Principle of the 3D Laser Radar
Instantaneously capturing an object's profile, location and any presence of motion for the purpose of safety enhancement.
The 3D Laser Radar is set apart from simple image sensors by its ability to provide consistent, reliable and real-time detection results regardless of environmental conditions such as poor lighting and heavy rail or snowfall.
Theory
- Based on the TOF (Time-of-Flight) principle, the time taken for the emitted laser light to return to its point of origin determines the distance between an obstacle and the 3D Laser Radar head.
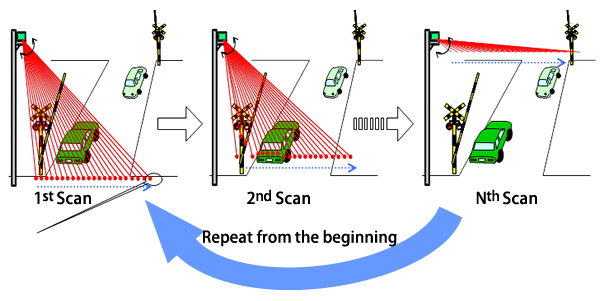
- The 3D Laser Radar is able to scan an entire detection area from one stationary location by gradually adjusting the angle the laser beam is emitted from.
Obstacle detection Method (Mechanism)
The 3D Laser Radar emits pulsed laser light to scan the detection area.
It then measures the (X, Y, Z) coordinates of every individual point scanned.
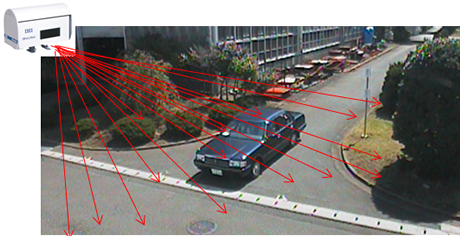
The data from light reflected back off an object is abstracted from all of the received scan data.
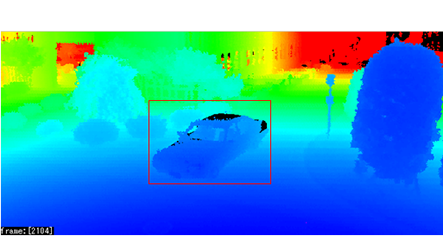 Calculation of the object's scan data creates a real-time 3D profile including size, location and velocity in less than a second.
Calculation of the object's scan data creates a real-time 3D profile including size, location and velocity in less than a second.
Special Features
Highly accurate detection at long range
Using the TOF calculation method the 3D Laser Radar can be relied on to precisely detect objects up to 50m (level-crossing system)/ 200m (ITS system).
Real-time tracking of all objects
Employment of IHI's unique moving-object detection algorithm enables continuous precise detection of objects, even ones that have remained stationary for a long period of time.
Resistance to harsh environmental conditions
Due to its unique noise elimination method, the 3D Laser Radar's performance is unaffected by its environment's lighting and weather conditions.
No interference to surrounding electronic systems
Due to its use of laser light rather than radio waves the 3D Laser Radar doesn’t affect other electronic systems in its vicinity.