Contributing to Marine Safety via Infrastructure Inspections and Seafloor Surveys
IHI's AUV technology to spearhead next-generation marine industries
IHI Corporation
An autonomous underwater vehicle (AUV), also called an underwater drone, is a robot that can navigate unmannedly and autonomously underwater and undersea at depths that are difficult for humans to reach. This article introduces the functions, structure, and control of these AUVs using IHI’s AUV as an example.

Introduction
In December 2023, the Headquarters for Ocean Policy of the Cabinet Office of Japan formulated “the Strategy for the Social Implementation of AUVs.” This was due to a sense of crisis over competition with Western countries that have taken the lead in the industrialization of AUVs, as the domestic market in Japan for the marine industry is expected to expand in the future. In recent years, for example, offshore wind power has been attracting more attention from the perspective of decarbonization. A detailed survey of seafloor conditions is required prior to the installation of offshore wind turbines. After installation, the installed cables and structures need ongoing maintenance and inspections, such as surveys of their deterioration. Considering the decline in the working-age population due to the falling birthrate and aging population, expectations are high for the use of fully automated AUVs that can navigate underwater without remote control by humans. The aforementioned strategy calls for the urgent need to promote the domestic production and industrialization of AUVs through collaboration between the government, companies, and research institutions.
Meanwhile, ensuring underwater and seafloor security is important from the perspective of national defense. Especially in recent years, securing maritime traffic security and conducting independent surveys of the country’s resources have become more important as the international circumstance has been changing more rapidly and complexly. To enable safe monitoring, the government desires to utilize AUVs as one of the components of an unmanned underwater/seafloor monitoring system.
IHI has been developing AUVs since the 1990s. This article introduces the characteristics of AUVs that are expected to be used in various fields and an overview of the AUV technology.
AUVs’ characteristics
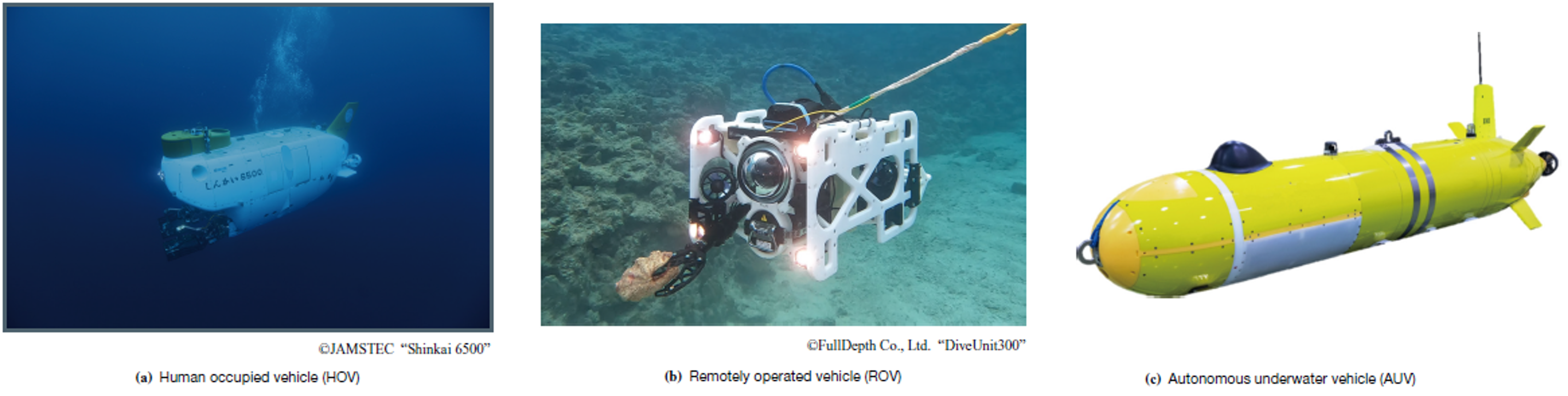
There are three types of underwater/undersea robots, categorized by their navigation methods. The following introduces these three types: human occupied vehicles (HOVs), remotely operated vehicles (ROVs), and AUVs.
HOVs are vehicles in which people board to go directly to the sea area or seafloor that they want to survey. HOVs can perform more detailed surveys and data collection than the other two types as the passengers make decisions on the spot and navigate the vehicle. However, they also require enormous costs for safety measures to ensure the safety of the passengers. They are large and require huge operation costs. HOVs are therefore used for large-scale national research and the development of seabed resources, which is profitable as a business.
ROVs are underwater robots that are navigated by humans via cable communication. They have become smaller and less expensive in recent years as there is a growing need for the inspection of offshore structures and the technology has developed. Operators on the sea navigate the vehicle to the inspection area or perform other operations while monitoring information from the camera or other devices installed on it. ROVs can respond more flexibly to situations than AUVs as they are operated remotely by humans. On the other hand, as ROVs use a cable, their coverage area depends on the length of the cable.
In contrast, AUVs are unmanned underwater robots that accomplish a given mission through autonomous control. Before being deployed into the sea, the AUV is given information on its route to the seafloor and observation areas. It then navigates through the ocean, adjusting its own speed and direction of travel to carry out its observation and other missions. The unmanned AUVs require a lower operational cost than HOVs and can operate in wider areas than ROVs as they are cableless. On the other hand, the cableless AUVs require highly reliable control as there is a risk of losing them.
AUV functions and structure
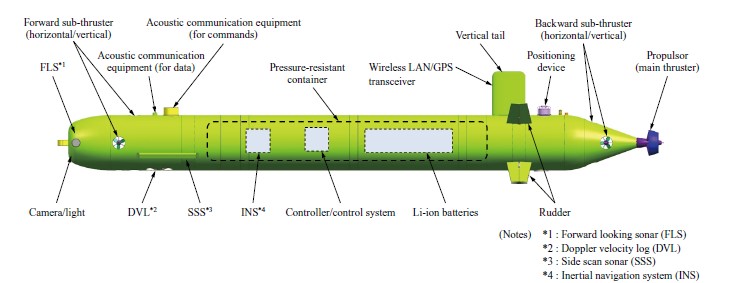
The following introduces the functions and structure of AUVs using IHI’s AUV for in-house testing. The vehicle was developed as an experimental vehicle to develop technologies for AUVs. It was used to obtain autonomous navigation and control technologies, confirm the performance of sensors and equipment installed, verify the X-rudder, and acquire the hovering function.
- (1) Navigation and mobility functions
- AUVs can generally cruise forward and backward with a propeller-type propulsor (main thruster). When the angle of the rudder attached to the side of the vehicle is changed during cruise, the AUV’s travel direction changes due to the hydrodynamic forces acting on the rudder. This test vehicle’s rudder is composed of four blades and installed in an X shape when seen from the front, and is called an X-rudder. Other types of AUV rudders include a cross rudder, which is installed in the shape of a cross when seen from the front. In general, the X-rudder requires more advanced control than the cross rudder, but has superior turning performance. In addition, some AUVs, such as this one, have sub-thrusters that can generate thrust in the vertical and lateral directions of the vehicle. By using the rudder and sub-thrusters together, the vehicle can hover at a single point in the sea, or navigate along complex undulations of seafloor topography.
- (2) Communication functions
- When an AUV is afloat at sea, it can communicate with the mother ship via wireless LAN using a wireless LAN transceiver installed in the vertical tail. However, during underwater navigation, devices that use radio waves are not used in general as signal strength decreases significantly underwater. Therefore, the vehicle uses acoustic communication equipment to communicate with a mother ship while navigating underwater. While acoustic communication can transmit less data than radio communication, it can communicate over longer distances even underwater.
- (3) Self-position estimating functions
- When an AUV is afloat at sea, it can determine its own position (latitude and longitude) by receiving GPS signals, but GPS is not available underwater. To determine its own position underwater, the AUV uses an inertial navigation system (INS) that can detect acceleration and a ground velocity indicator (Doppler velocity log : DVL) that uses the Doppler effect of sound. Location information can be calculated by integral computation of data obtained by these systems. The estimated self-position information will accumulate more calculation errors as time elapses during cruise. Therefore, if accurate self-positioning is required, the vehicle must surface once and correct the estimated self-position data by GPS. The timing and frequency of surfacing are planned considering the balance of the tolerance for error in the mission with fuel consumption and operational efficiency.
- (4) Object and terrain sensing functions
- Sunlight does not reach the depths where AUVs are expected to be active. For this reason, it is necessary to use also a light when conducting a survey using an optical camera. Generally, sound-based sensors (sonar) are used to detect obstacles and survey terrain irregularities in such deep waters. This test vehicle is equipped with a forward looking sonar (FLS) for obstacle detection on the front and a side scan sonar (SSS) for seafloor exploration on both sides. The SSS is a sonar that acquires images of the intensity of sound waves reflected from the seafloor, and can be used to survey the shape of the seafloor, check the distribution of materials (such as rocks, sand, and mud), and search for objects that have fallen to the seafloor.
- (5) Pressure-resistant capabilities
- The deeper the water depth is, the greater the water pressure on the AUV. Therefore, it is necessary to select sensors, thrusters and acoustic communication equipment that are designed to sufficiently withstand water and pressure for use in deep water. However, equipment that is difficult to design to withstand water and pressure, such as batteries and controllers, must be stored in a pressure-resistant container that is suitable for the depth at which the AUV is used. Since this vehicle is designed for use in waters up to 3,000 m deep, it has a pressure-resistant container that can withstand approximately 300 atmospheres.
AUV control
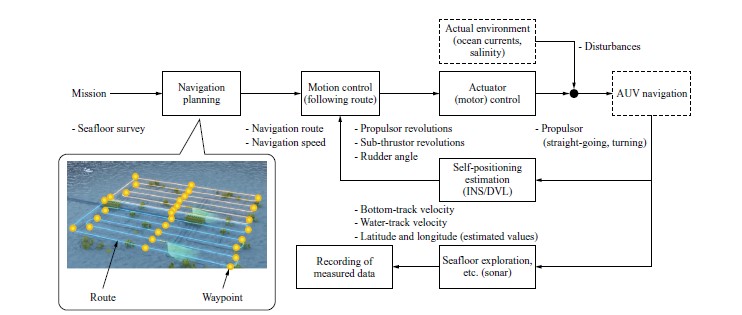
An AUV is a robot that accomplishes a given mission through autonomous control. This section presents an example of AUV control flow, assuming a mission to survey the seafloor.
First, the user sets a seafloor route to be surveyed in the AUV. In general, AUV routes are specified by a set of points called waypoints. Each waypoint has information such as latitude, longitude, depth, and speed. The AUV navigates along its route by repeatedly targeting waypoints during cruise. However, in a real environment, ocean currents and changes in buoyancy due to differences in salinity of seawater introduce external forces to the AUV that cause it to deviate from its route. Therefore, the AUV constantly estimates its own position using the aforementioned INS and DVL to fine-tune its speed and direction of travel to reach the target waypoints.
To properly operate its propulsor and rudder to adjust its speed and travel direction, the AUV needs motion control based on a motion model. The motion model is a mathematical expression of the motion of the AUV due to hydrodynamic forces. The number of propulsor revolutions and the angle of the rudder are determined based on the motion model and are transmitted to the motor as electrical commands, enabling the AUV to cruise along its planned route. While cruising along the desired route, the AUV surveys the seafloor using sonar such as SSS.
Thus, an AUV can be used for unmanned surveys to safely obtain detailed information on a wide range of deep-sea conditions. For example, it can survey the condition of the seafloor before the installation of underwater infrastructure and investigate suspicious underwater objects.
Conclusion
This article introduces the characteristics and functions of AUVs, as well as their structure and controls using IHI’s AUV as an example. IHI has delivered AUVs to the Ministry of Defense and Japan Coast Guard utilizing the technologies presented here. We are also participating in national research and development. In the Cross-ministerial Strategic Innovation Promotion Program (SIP) of the Cabinet Office, IHI participated in “Sea Trials of Multiple Heterogenous Cruising AUVs and ASV with Basic Formation Control” using the AUV introduced in this article. We will continuously develop the technologies to contribute to various marine industries and maritime security.