高度自動化を実現するオペレーショナル・テクノロジー
- 執筆者の所属名は発行当時のものです。
- IHI技報に掲載されている情報は発行当時のものです。開発、製品製造を終了している可能性がありますので、ご了承ください。
オペレーショナル・テクノロジー
労働力不足、ニーズの多様化・短期化、需要変動の拡大などの社会課題に対して、ロボット技術や情報技術を融合して、ロボットや装置群を安全かつ効率的に運用制御する技術であるオペレーショナルテクノロジーの開発を進めています。物流を始めとする各種分野で、システムインテグレータとしてより価値の高いロボティクスソリューションの提供を目指しています。
オペレーショナル・テクノロジー関連記事
YouTube
複数の自律走行ロボット(AMR)の運用制御、人とロボットの協働
需要変動の拡大などに伴って現場に求められる機能として、ロボットの増減で処理能力を容易に増減できる「拡張縮小性」、搬送ルートや配置変更を容易に行える「柔軟性」、一部のロボットが停止しても残るロボットで稼働継続できる「可用性」を実現するための複数AMR※1の運行制御技術を開発中です。
本システムは、集中管制側で複数AMRの運行状況を監視しつつ、AMRや受渡作業の遅延などに合わせてルートを再計算することで、AMR同士が接触せずにスムーズな運行を実現できます。また、人とロボットの完全分離が難しい作業・環境向けに、複数の人・AMRが同じ空間にいても止まらずに作業継続できる、安全性と効率性を両立するための技術開発も進めています。具体的には各種センサ情報からの障害物や人の認識・識別技術、ロボットが安全状態から逸脱しないように数理的制約を課すことのできるCBF※2などの制御技術を組み合わせて実現しています。
※1: Autonomous Mobile Robot
※2: Control Barrier Function


複数の自律移動ロボット(AMR)の運用制御、人とロボットの協働関連記事
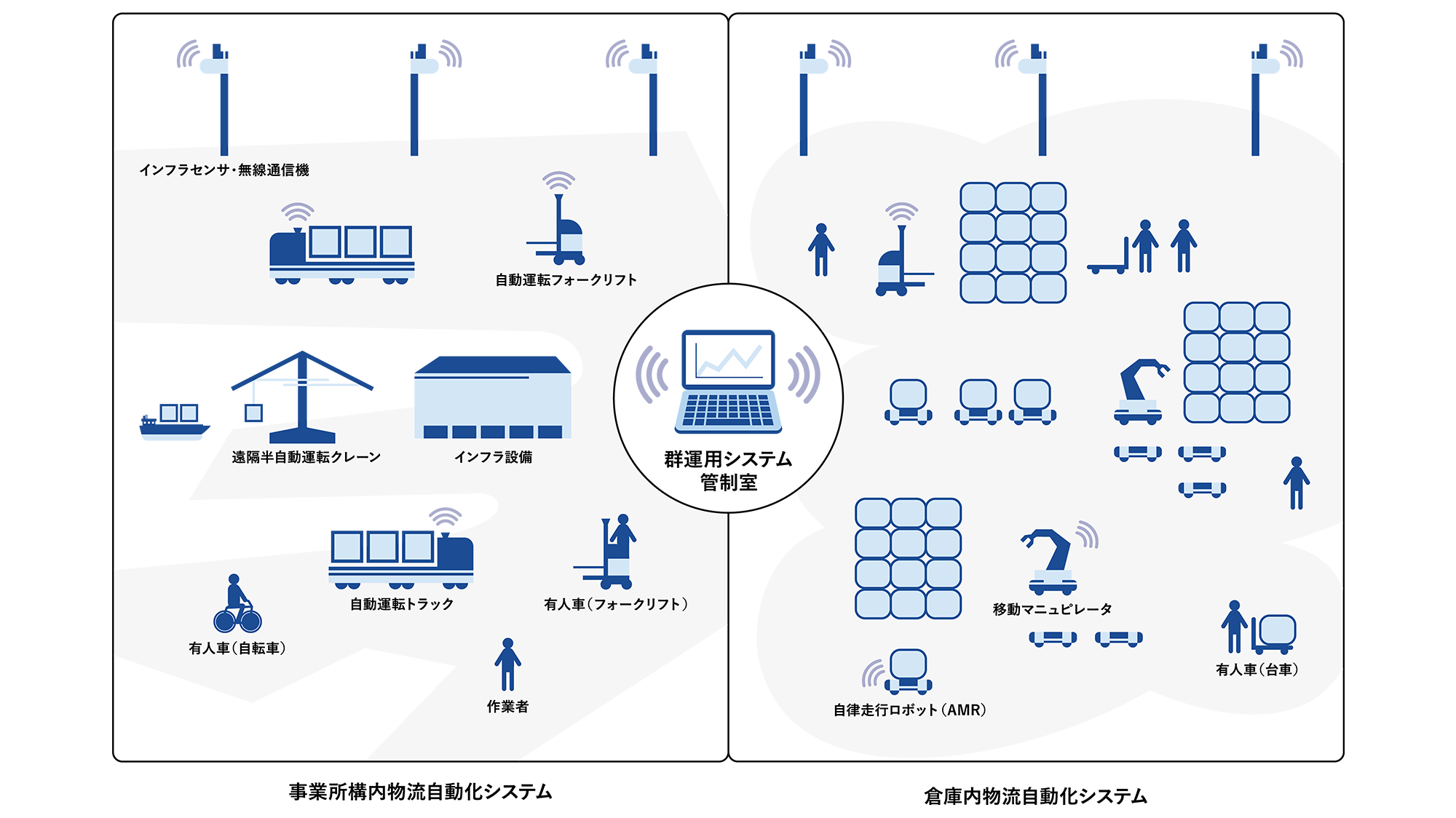
ロボット・自動機器群管理・群制御のためのシステム基盤
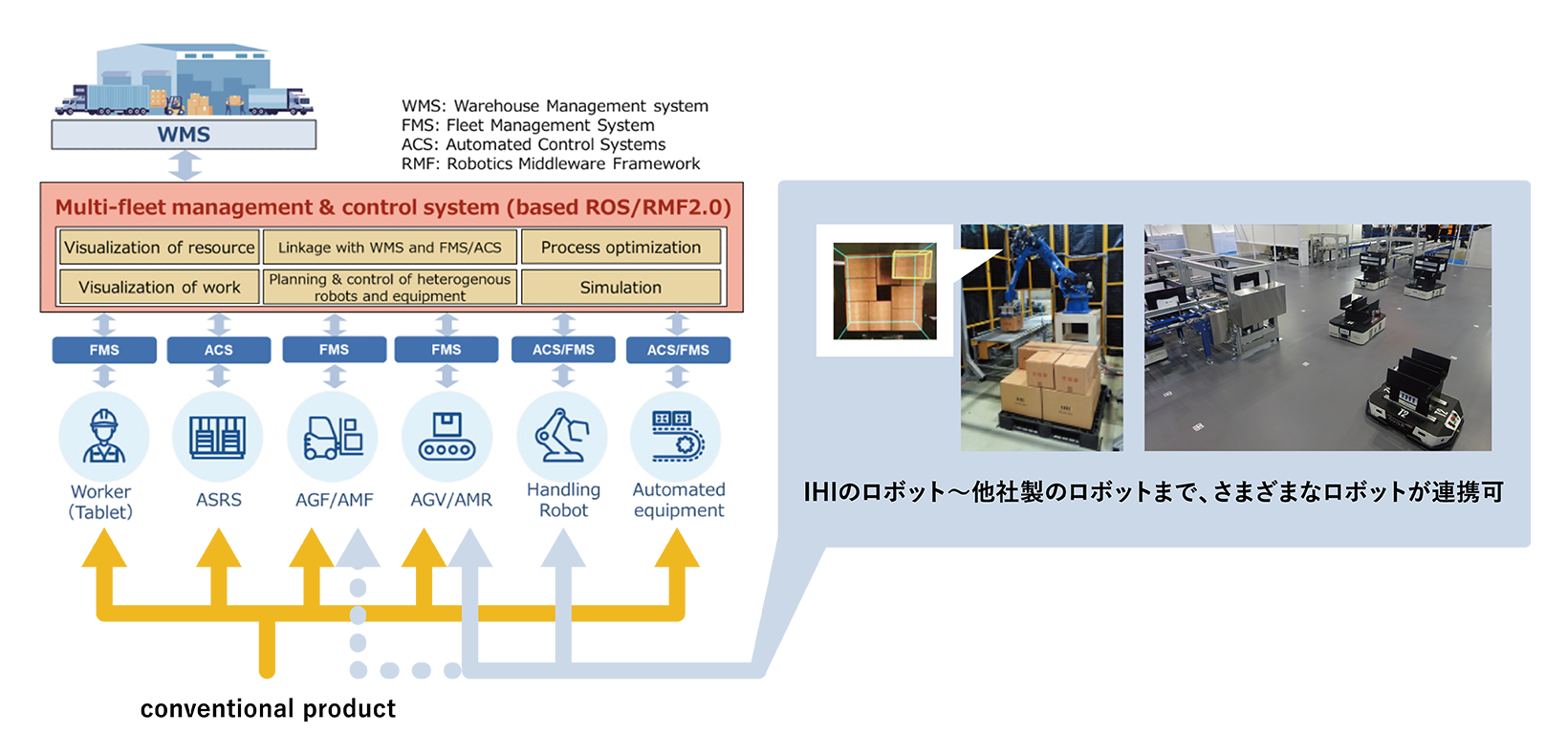
倉庫や工場内で、100台規模の異種・複数のAMRやハンドリングロボット、自動倉庫、周辺装置などを連携して運用する管理・制御システムの開発、および開発環境の構築を進めています。
他社製品を含む多様なリソースを統合的に運用できる「相互運用性」の高いシステムを実現するため、ARTC/A*STARが運営しロボット開発用ミドルウェア“Robot Operating System(ROS)”の産業応用を推進するROS-Industrial Consortium Asia Pacificと連携しています。この取り組みでは、各種通信を共通で扱う仕組み、情報を一元管理するデータベース、ロボットオペレーションをタスクに分解してスケジューリングする機能、全体の運用状況を可視化するシミュレータなどの開発を進めています。
現在は、ニーズの高い生産・物流分野での応用から着手していますが、将来的には防衛や原子力分野の危険地域・区域での多数無人機運用、エネルギー分野の施設管理・点検・保守など、多様な事業領域に貢献する基盤の構築を目指しています。
出典: ROS-Industrial Consortium Asia Pacific
ロボット・自動機器群管理・群制御のためのシステム基盤関連記事