交通流データを活用して持続可能なモビリティ社会を実現 IHIのLiDAR技術で生成した交通流データによって,安全・安心なモビリティ社会の早期実現に貢献します
株式会社IHI
MaaS (Mobility as a Service) やCASE (Connected, Autonomous, Shared & Services, Electric) といったトレンドに代表される新たなモビリティ社会が到来しようとしている.三次元レーザレーダで交通安全に貢献してきたIHIが思い描く近未来のモビリティ社会の実現に向けた取り組みを紹介する.
モビリティ社会の未来
近年,MaaSと関連が深くCASEでも取り上げられる自動運転技術の開発が,世界中で盛んに行われている.我が国でも普通乗用車の段階的な自動運転をはじめ,大型バスの自動運転や高速道路上での大型トラックの後続無人隊列走行など,さまざまな自動運転プロジェクトが計画・実施されている.最近では自動運転車両単体だけではなく,道路上の設備としてのインフラセンサーシステムとの協調により,安全性や利便性を向上させる取り組みが進められている.IHIでは,これまでLiDAR (Light Detection And Ranging) を使用した交通安全支援システムを開発し,さまざまな場所に導入している.これまでに培ってきた技術を基に,IHIが思い描く近未来のモビリティ社会の実現に向けた取り組みを紹介する.
これまでのIHIの取り組み
IHIでは,1990年代から悪環境下における輸送機械や作業機械の自動化を支援するためのセンシングシステム技術の開発を行い,三次元物体を認識する独自のLiDARセンサーである三次元レーザレーダ (3D Laser Radar) を開発した.そして,鉄道の踏切障害物検知装置として採用され,2005年に1号機を納入して以来,日本やヨーロッパなど国内外で,累計2 400台以上を販売している.本装置は,踏切内に取り残された自動車や人を検知して,その情報を踏切に接近する列車の乗務員に通報することで,事故を未然に防ぎ,鉄道の安全な運行に貢献している.また,ITS (Intelligent Transport Systems) 分野への適用も並行して進めており,踏切内の滞留物体を検知する踏切障害物検知装置と異なり,自動車やトラックなどの移動物体を追跡・種別する,より高度な検知処理技術を,さまざまなテストをとおして確立してきた.そして三次元レーザレーダは,UTMS (Universal Traffic Management Systems) 協会の安全運転支援システムであるDSSS (Driving Safety Support System) にも採用されており,交通安全に貢献している.さらに,シンガポールでも実証実験を行っており,改良を重ねている (IHI技報Vol. 56 No. 1 pp. 10-13「交差点をモニターし運転者に注意喚起する」参照) .

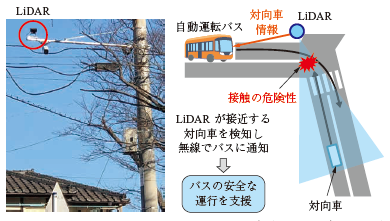
そして,近年では国内のさまざまな場所で実施されている自動運転バスの実証プロジェクトに参加し,自動運転走行ルート上にある,見通しが悪く信号のない交差点において,対向車両情報を自動運転バスに送信することで安全運行支援などの実証を行っている.
自動運転実現に向けての課題
一方,自動車メーカーなどでの自動運転開発も加速しており,早期実現が期待されている.しかし自動運転開発の課題として,検証やシミュレーションに適用可能な,実際の公道上で取得したテストケースデータが不足していることが挙げられる.このため,自動運転技術を確立するために必須とされる安全性の担保が困難になっている.そこで,開発中の自動運転システムの安全性を検証するため,事故やヒヤリハットなど公道上で起こり得る,ありとあらゆる交通シナリオを網羅したテストケースデータが重要となってくる.しかしながら,現状では交通事故レポートなどを基に,人が一つひとつテストケースデータを作成していることが多く,交通事故の発生に至るまでの過程や,交通事故当事者以外の周囲状況などの情報が不足しており,自動運転システムの機能安全の検証に必要な情報の網羅性が乏しいことが課題である.
そのため,実際の交通状況を網羅的に把握する交通計測方法が必要である.一般的な方法としてビデオカメラが使用されるが平面画像であるため,自動車,自動二輪車,自転車,および歩行者などから構成される交通参加者の奥行きなどの相対位置精度が低く,交通シナリオの抽出が容易ではない.そして,昼夜や天候により環境光が変化するため,環境による影響を受けやすいといった課題がある.ほかの方法として,車両に装着されているETC2.0車載器による走行履歴情報データを使用する方法もあるが,現状では,位置情報の精度がそれほど高くなく,広く普及していない.一方で,LiDARはビデオカメラとは異なり,タイムオブフライト法と呼ばれる,光を発射し対象物に当たった反射波を測定することで対象物までの距離を計測する方式のため,環境による影響を受けにくく,ビデオカメラよりも高精度に交通参加者の位置情報を取得することができる.そこで,LiDARを活用して交通流を計測し位置情報を取得することで,交通シナリオシーンの抽出と自動運転開発に必要なテストケースデータの生成・再現を可能とした.
高精度な物体寸法・軌跡生成
テストケースデータでは,交通参加者の高精度な移動軌跡データが必要となるため,IHIではさまざまな技術開発を行っている.
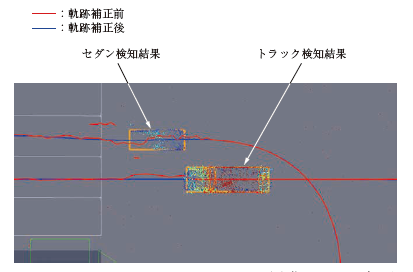
例えば,一般的な公道上においてLiDARを1台だけ設置した場合,LiDARの前方を大型トラックや大型バスが通過する間,人間が見る場合と同様にLiDARの視界が遮られてしまう.そのため,LiDARから発するレーザが照射される手前の物体の表面しか検出できず (死角の発生) ,向こう側の交通状況を把握することが困難となる.そこで,IHIではこの死角がなくなるように複数のLiDARを配置し,LiDARのキャリブレーションや複数のLiDARのデータを,矛盾なく時系列データとして統合する技術により,すべてのLiDARで計測したデータを一つにまとめることで,走行車両の高精度な物体寸法や軌跡の生成を可能とした.また,こうして生成した軌跡にも計測誤差によるぶれやデータ飛びは存在する.これに対して軌跡を推定し平滑化するアルゴリズムを適用することで,軌跡を補正し高い挙動精度の軌跡を生成することが可能となった.
ヒヤリハットシーンの抽出
前述の高精度な移動軌跡データを用いて,交通事故の一歩手前であるヒヤリハットシーンを抽出する処理技術を開発している.
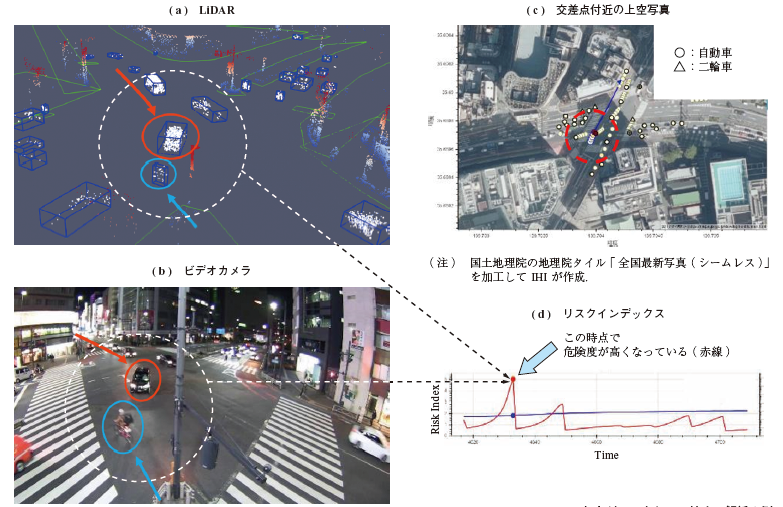
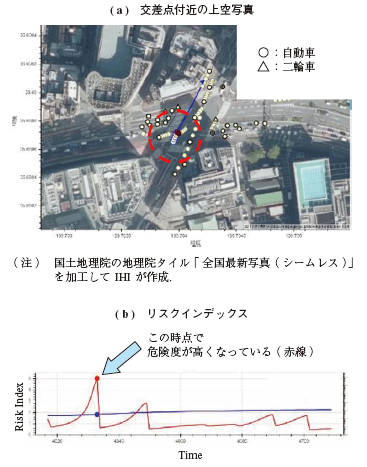
交通事故とは異なり,ヒヤリハットの事例は記録として残ることは少ないが,もう一歩で交通事故になり得たシーンであるため,自動運転開発向けテストケースデータの網羅性を高めるには必要なシナリオであると考える.IHIでは,生成した移動軌跡データのなかから交通参加者の移動速度や接近度合いを用いて危険度のパラメータ (リスクインデックス) を定義することで,ヒヤリハットと想定されるシーンを抽出する処理技術を開発した.次ページ左上図は右折車両と自転車のヒヤリハットシーンを抽出したものである.この技術により膨大なデータのなかから特定のヒヤリハットのシーンを抽出し,自動運転開発時のテストケースデータとして適用することが可能である.
交通シミュレーションへの対応
安全・安心なモビリティ社会の実現に向け,自動運転開発と並行して,道路環境の改善 (交通事故低減・渋滞解消) も重要である.我が国においても交通事故や渋滞が多く発生する交差点は全国的に存在している.このような交差点では,一般にビデオカメラを使用して分析を行っているが,高精度な相対位置把握は容易ではない.また,渋滞の検証を行う場合,手段として汎用の交通シミュレーターの利用が挙げられるが,シミュレーションの精度を高めるためには,現実の挙動に近いパラメータを入力する必要がある.そこで,LiDARデータを分析することにより,ビデオカメラと同様に渋滞状況や事故状況を捉えるだけではなく,交通参加者の移動速度・加速度情報も取得可能であるため,交通シミュレーターのシミュレーション精度を高めることが可能である.
交通シミュレーターでは,交通状況や信号制御の効果などのシミュレーションが可能であり,交通渋滞解消に向けた道路改良のための検証が可能である.しかし現実の道路環境には,さまざまな車両や運転手の運転特性,道路形状,そして天候や時刻などの道路状況によって無数の組み合わせパターンが存在し,実際の挙動をシミュレーター上に再現するには非常に難易度が高い.そこで,LiDARデータで生成した,交通参加者の移動速度・加速度を含む実際の交通流データをパラメータ化して交通シミュレーターに入力することで,実際の公道上のデータと照らし合わせた高精度な検証が可能な技術開発を行っており,デジタルツインを活用した道路環境の改善に貢献する.

安全・安心なモビリティ社会の実現に向けて
IHIはLiDARによるさまざまな交通流データを活用して自動運転の早期実現に向けた課題解決に取り組んでいる.そして,さまざまな地域の交通流データから地域ごとの特徴を押さえ,さらにLiDARだけではなく社内外のさまざまなデータやシミュレーション技術を結びつけて,仮想空間上に「動く街」を生成することで,街のデジタルツインの実現を目指している.その仮想空間上では,現実と同様に人やクルマが共存し,ヒヤリハットや渋滞状況などの挙動を常にシミュレーションし予測することで,現実空間上での事故防止・渋滞抑制対策が可能となる.この「動く街」は,データを活用することで安全とモビリティが調和し,同時に渋滞による環境負荷を低減することができる,本当の意味でのスマートシティの実現につながると考えている.
このようにIHIは,LiDAR技術によって安全・安心で暮らしやすい街づくりに貢献することで,持続可能なモビリティ社会を実現していく.