海洋インフラ点検や海底調査で海の安心・安全に貢献する
次世代の海洋産業をリードするIHIのAUV技術
株式会社IHI
自律型水中航走体 ( Autonomous Underwater Vehicle:AUV ) は,水中ドローンとも呼ばれ,人が行くことが困難な深度の水中・海中を,無人で自律的に航走するロボットである.本稿ではIHIのAUVを例にその機能,構造,制御を紹介する.
はじめに
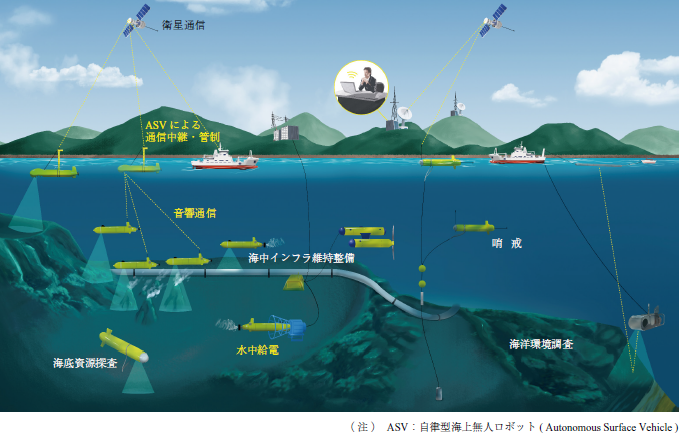
2023 年12 月に,内閣府の総合海洋政策本部により,「自律型無人探査機 ( AUV ) の社会実装に向けた戦略」が策定された.この背景には,海洋産業の国内市場の拡大が今後期待されるなかで,自律型水中航走体 ( Autonomous Underwater Vehicle:AUV ) の産業化に先んじている欧米諸国との競合に対する危機感がある.例えば近年,脱炭素化の観点から洋上風力発電への注目が高まっている.洋上風力発電の設置前には詳細な海底状況の調査を必要とする.また,設置後も敷設したケーブルや構造物の劣化具合の調査といった保守・点検が継続的に必要になる.少子高齢化による生産年齢人口の減少も考慮すると,人による遠隔操縦を必要とせず,全自動で水中を航走するAUVの利用への期待は高い.前述の戦略では,国と企業,研究機関が連携してAUVの国産化・産業化を進めていくことが急務とされている.
また一方で,日本の安全保障環境の観点からも,海中・海底の安全確保は重要である.とりわけ近年,国際社会のパワーバランスの変化が加速・複雑化しており,海上交通の安全確保や,自国資源の独自調査の重要性は増してきている.監視者の安全のためにも,無人で海中・海底を監視するシステムの構成要素の一つとして,AUVの活用が国から望まれている.
IHIは,1990 年代からAUVの開発を行ってきており,本稿では,さまざまな分野で活用が期待されるAUVの特徴やAUV技術の概要を紹介する.
AUVの特徴
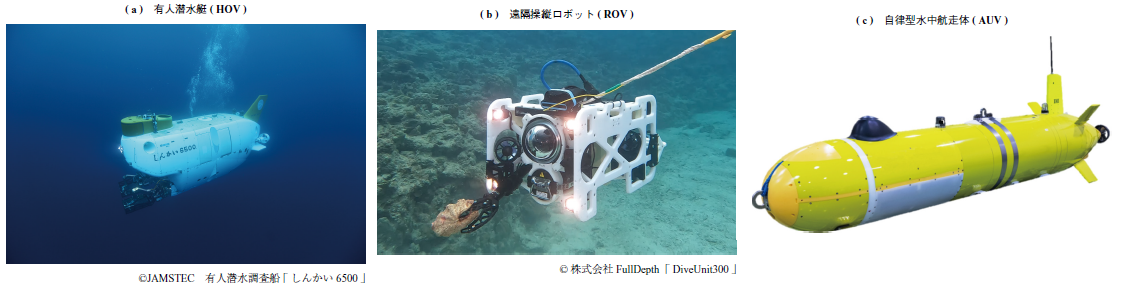
水中・海中探査ロボットには,操縦方法の観点から,大きく分けて3 種類の形態がある.
有人潜水艇 ( Human Occupied Vehicle:HOV ) は,人が搭乗し,調査したい海域・海底まで直接向かう乗り物である.搭乗者が現場で判断し,操縦するため,後述の種類のロボットに比べて詳細な調査や資料採取などの作業が可能な一方で,搭乗者の安全を確保するための安全対策に膨大なコストを必要とする.装置は大型で,運用コストも大きい.このため,HOVは,国を挙げての大規模な研究や,ビジネスとして採算度の高い海底資源開発などに使用される.
遠隔操縦ロボット ( Remotely Operated Vehicle:ROV ) は,ケーブルを介した通信により人が操縦する水中ロボットである.近年,海洋構造物の点検ニーズの高まりや技術の発達とともに,小型化,低価格化が進んでいる.水上にいる操縦者は,ROVに設置されたカメラなどの情報をモニタリングしながら,点検場所へ移動させるなどの操縦をする.遠隔ではあるが人が操縦するので,後述のAUVに比べて臨機応変に現場対応できる.一方,ケーブルを用いるため,使用できる範囲はケーブルの長さに依存する.
これらに対しAUVは,与えられたミッションを自律的な制御によって達成する無人水中ロボットである.海に投入される前に,海底までの経路や観測エリアなど情報を与えられた後,自らの速度や進行方向を調節しながら海中を航走し,観測などのミッションを遂行する.無人のためHOVに比べて運用コストが安いこと,またケーブルレスのためROVに比べて運用できる範囲が広いことが特徴である.一方で,ケーブルレスゆえに紛失リスクがあるため,AUVの制御には高い信頼性が求められる.
AUVの機能・構造
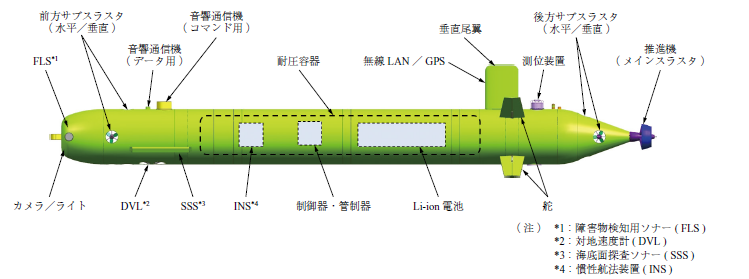
IHI製AUV社内試験機を例に,AUVの機能・構造について紹介する.この機体はAUVに関する技術開発のための試験機として開発された.これまで,自律航走制御技術の獲得,各種センサー,搭載機器の性能確認,X舵(だ)検証,ホバリング機能獲得などに活用された.
- (1) 航走・運動機能
- AUVは一般的に,プロペラ型の推進器(メインスラスタ)で,前方ないし後方に航走することができる.また航走中に,機体の側面に取り付けられた舵(かじ)の角度を変更すると,舵に作用する流体力により,AUVの進行方向が変化する.この機体の舵は,機体正面から見てアルファベット文字のXの形のように4 枚が配置され,X 舵と呼ばれている.なお,ほかのAUVの舵の種類として,機体正面から見て十字型に配置される十字舵と呼ばれる配置もある.一般的にX 舵は,十字舵に比べて高度な制御が必要な反面,旋回性能が優れている.加えてこの機体のように,AUVの上下方向や左右方向に推力を発生できるサブスラスタをもつAUVもある.舵とサブスラスタを併用することで,海中の一点に静止するホバリングや,複雑な隆起の海底地形に倣う航走なども可能になる.
- (2) 通信機能
- AUVが海上に浮上している場合は,垂直尾翼内に設置された無線LANで母船と通信できる.しかし,いったん潜航してしまうと,水中では電波強度が著しく減衰するため,電波を使う機器は一般的には使用されない.そのため,海中に潜航している状態から母船などと通信を行うことが必要な場合は,音響通信機を用いる.音響通信は電波通信に比べて送信可能なデータ量は少ないが,水中でも長い距離で通信可能である.
- (3) 自己位置推定機能
- AUVが海上に浮上している場合はGPSの電波受信によって自己位置(緯度・経度)を知ることができるが,海中ではGPSが利用できない.このため,AUVが自己位置を把握するためには,加速度を検出できる慣性航法装置 ( Inertial Navigation System:INS ) と,音のドップラー効果を利用した対地速度計 ( Doppler Velocity Log:DVL ) を使用する.これらのデータを積分計算することで位置情報を算出することが可能となる.算出された自己位置は,航走中の時間が経過するほど計算誤差が累積する.このため,正確な自己位置を知る必要がある場合は,いったん浮上してGPSで自己位置を補正する必要がある.浮上のタイミングや頻度は,ミッションにおける誤差の許容度と,燃費や作業効率とのバランスを考慮して計画される.
- (4) 物体や地形のセンシング機能
- AUVの活躍が期待される深度の海中には,太陽光が届かない.このため,光学カメラを用いた調査を行いたい場合は,照明(ライト)を併せて利用する必要がある.また一般的にこのような深海での障害物の検知や地形の凹凸の調査には,音を用いたセンサー(ソナー)が用いられる.この機体は,機体の前面に設けられた障害物検知用ソナー ( Forward Looking Sonar:FLS ) や,機体の両脇に設けられた海底面探査ソナー ( Side Scan Sonar:SSS ) を備えている.SSSは,海底からの音波の反射強度を画像として取得するソナーで,海底の形状調査や物質(岩,砂,泥など)の分布確認,水中落下物の探索などに用いることができる.
- (5) 耐圧機能
- 水深が深くなるほど,AUVにかかる水圧が大きくなる.そのため,センサーやスラスタ,音響通信機などは,深海での活用を前提とした十分な耐水・耐圧設計されたものを選定する必要がある.しかし,耐水・耐圧設計が困難な機器,例えば電池や制御器などは,AUVを活用する深度に応じた耐圧容器に格納する必要がある.この機体は水深3 000 mまでの海域での使用を想定して設計しているため,約300気圧に耐えられる耐圧容器をもつ.
AUVの制御
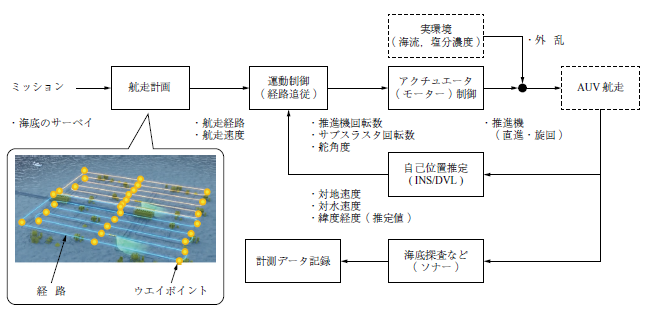
AUVは,与えられたミッションを自律的な制御によって達成するロボットである.ここでは海底の状況を調査するというミッションを想定して,AUVの制御フローの例を紹介する.
初めにユーザーが,調査を行う海底の経路をAUVに設定する.一般的にAUVの経路は,ウエイポイントと呼ばれる点群で指定されることが多い.それぞれのウエイポイントは,緯度,経度,深度,速度などの情報をもつ.AUVはウエイポイントを目標に航走することを順々に繰り返すことで,経路に沿って航走する.しかし実環境では,海流や,海水の塩分濃度の違いによる浮力変化が,経路逸脱の要因となる外力としてAUVに加わる.そのため,常に前述のINSとDVLを用いた自己位置推定を行い,目標とするウエイポイントに対する自らの速度や進行方向の微調整を行っている.
AUVが速度や進行方向の調整のため,適切に推進機や舵を作動させるためには,運動モデルに基づいた運動制御が必要である.運動モデルとは,流体力によるAUVの運動を数式化したものである.これにより推進機の回転数と舵の角度が決定され,電気的な指令としてモーターに伝わり,AUVは経路上を航走する.そして,調査したい経路上での航走中に,SSSなどのソナーを用いて海底探査を実施する.
このようにAUVを用いることで,無人で,安全に,広範囲の深海の詳細な状況把握が可能になる.例えば,海中インフラ設置前の海底の状況調査や,海中不審物の調査などが実施できる.
おわりに
AUVの特徴や,IHI製AUVを例にした機能,構造,制御を紹介した.ここに紹介した技術を活用して,IHIはこれまでに防衛省や海上保安庁にAUVを納入している.また,国の研究開発にも積極的に参画している.内閣府の戦略的イノベーション創造プログラム ( SIP ) では,ここに紹介したAUVを用いて,「異機種複数AUV基本隊列制御同時潜航試験」に参加した.今後も技術開発を継続し,国内のさまざまな海洋産業や海洋安全保障に貢献していく.