ASDタグボート操船制御システム
熟練技術を代替する直感的な操船の実現
株式会社IHI原動機
少子高齢化による労働力不足が深刻化する中,タグボート業界では操船技術の習得に長期間を要することが課題となっている.こうした状況を受け,直感的な操作を可能にする三次元ジョイスティックを活用した新しい操船制御システムを開発している.従来の課題を踏まえ,このシステムについて紹介する.

アジマススラスターとは
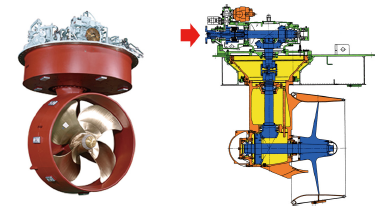
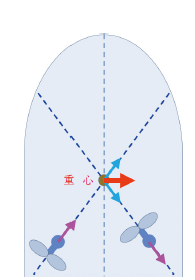
ASD ( Azimuth Stern Drive ) タグボートの推進器であるアジマススラスターは,スクリュー型プロペラを水平方向に360°旋回させることができる推進器で,アジマスとは方位角を意味する.
アジマススラスター断面図の赤矢印部がプロペラ回転の入力軸で,主機関からの回転軸が接続され,ここから入力された動力は上部と下部にある傘歯車を介してプロペラ軸に伝達されプロペラが回転する.この動力の伝達経路がアルファベットのZに似ていることから,Z-Driveと呼ばれる.
なお,入力軸の直後にはスリップクラッチが搭載され,外部からの指令により動力の伝達率を変えることができる.
ASDタグボートとは
アジマススラスター2 機を船尾側に左右対称に配置したタグボートはASDタグボートと呼ばれ,ほとんどの港湾タグボートはこのASDを採用している.
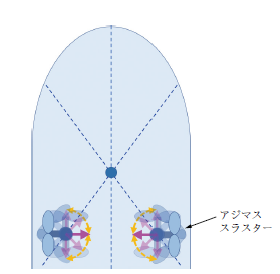
ASDタグボートは旋回性能に優れ,船速がなくとも旋回が可能(通常のラダー船では船速ゼロでは舵(かじ)が効かない)で,機敏な動きができる.
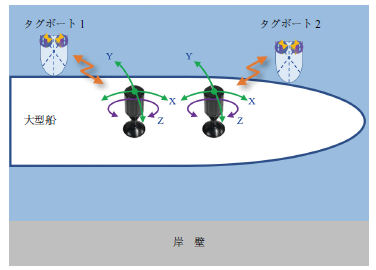
また,各舷のスラスター方位およびプロペラ回転速度の組み合わせにより横行操船も可能で,直進している大型船と直角に並走(横行並走)することができるため,パイロット(水先案内人)からの指令に従い即座に大型船を押したり引いたりすることができる.
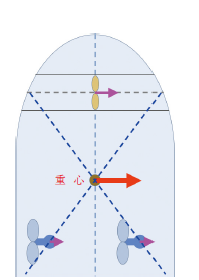
ただし,OSV ( Offshore Support Vessel ) など他の作業船は一般作業船図のようにバウスラスター(左右方向に推力を出すサイドスラスターで船首付近の中央に配置される)があるため,横行操船が比較的簡単に行える一方で,ASDタグボートはバウスラスターがないため横行操船時のバランス制御が非常に難しい.
現状の操船制御システム
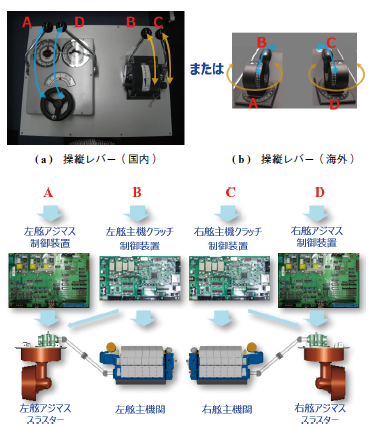
操縦レバーは,国内では現状の制御システムの構成図 ( a ) のように四つのレバーで構成され,海外では ( b ) のようにレバーと回頭ダイヤルの組み合わせたユニットが1 対使用される.これらのレバーABCDの前後操作または回転操作信号は,それぞれ,
A:左舷アジマス制御装置
B:左舷主機クラッチ制御装置
C:右舷主機クラッチ制御装置
D:右舷アジマス制御装置
に入力され,各制御装置はこれらの指令信号の基づき,各舷のアジマス方位,主機回転速度,クラッチスリップ率を制御する.なお,主機クラッチ制御装置は,クラッチスリップ領域(主機アイドル回転)とクラッチ直結領域(主機アイドル回転 ~ 最大回転)を巧みに使い分けることで,クラッチの有無を意識することなくシームレスなレバー操作を実現している.
オペレーターは,2 本の手で,これらの四つの制御要素を高度な操船技術を駆使して巧みにさばいている.これには長年培ったノウハウが必要で相当な習熟時間を要し,タグ作業ができるようになるまでに5 ~ 10 年かかるともいわれている.
新しい操船制御システム
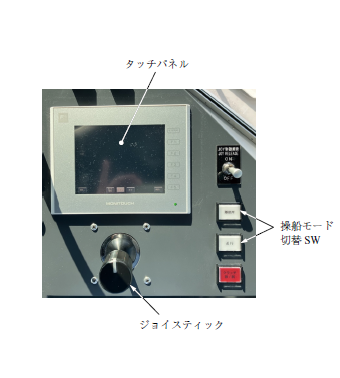
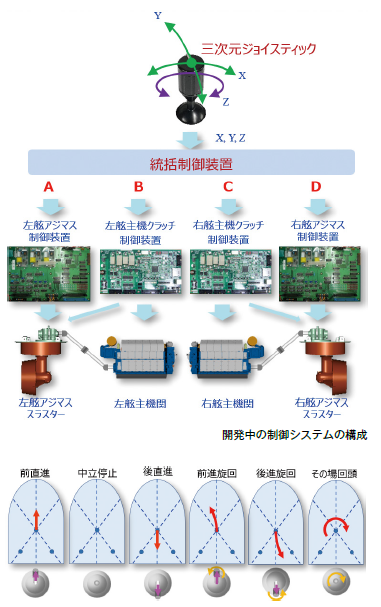
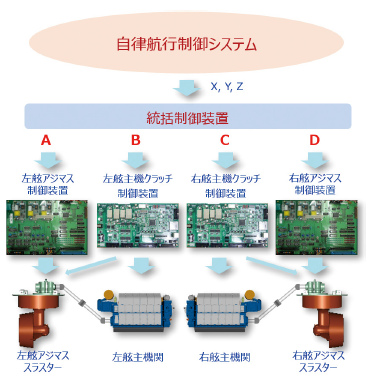
そこで,株式会社IHI原動機 ( IPS ) では開発中の制御システムの構成図のようなジョイスティック1 本で直感的に操縦できるシステムを開発している.統括制御装置は,ジョイスティックの操作信号から,従来のシステムと等価な指令信号ABCDを生成し,下位の制御装置に出力するもので,熟練オペレーターの操船ノウハウを代替するためのソフトウェア(制御ロジック)を搭載している.
操船機能
三次元ジョイスティックを使って直感的な操船を実現するために,次の二つの操船モードを用意した.
- (1)航走モード
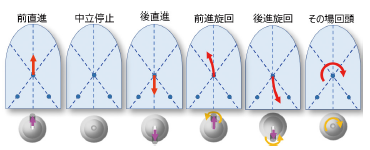
- 一般航行時に利用するモードで,低速 ~高速航行が可能.航走モードでのジョイスティック操縦と船体の動き図の下部に示すように,ジョイスティックを前方に倒すと前進,手前に引くと後進し,ジョイスティックの倒し量に応じて推力の大きさが変化する.また,ジョイスティックを船体の回頭方向にひねることで旋回し,ひねり量に応じた回頭力を発生させることができる.
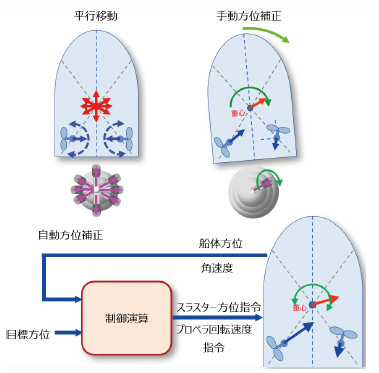
- (2)離接岸モード
- ジョイスティックを倒した方向へ船体を平行移動させるモードで,ジョイスティックの倒し量に応じて推力の大きさが変化する.また,ジョイスティックのひねり操作により船体方位を修正することができる.さらに,方位センサーからの船体方位/角速度フィードバック信号により自動で船体方位を保持させることもできる.
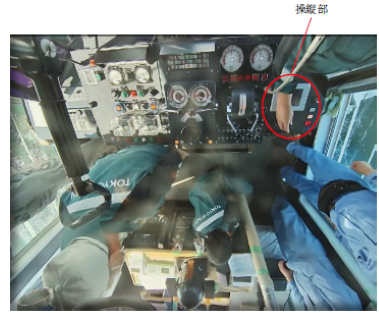
実船テスト
試作装置を,東京 ~ 横浜 ~ 横須賀エリアで運航するエスコートタグボート「吾妻丸」(東京汽船)に搭載し航行テストを実施した.前記操船機能についてひととおり良好動作を確認した.

今後の展開
今後は,IPSが開発したタグボート用の制御監視システム「ACTIVE CATS®」との連携やGUI ( Graphic User Interface ) を充実させ,製品化を進めていく.
なお,本技術は,オペレーションセンターやタグ作業の対象となる大型船自身にジョイスティック操縦装置を設置し,パイロットの無線機による音声指示の代わりに直接タグボートを遠隔で操船するような遠隔操船制御システムへの適用も有望であると考えている.
さらに,本システムは,ジョイスティックの代わりに,複数のセンサーからの信号の組み合わせによる状況判断,航路決定,操船動作決定などを行う自律航行の上位システムと連携することにより,この上位システムからの指令どおりに船体の動きを忠実に制御することができるため,自律航行・自動操船への適用も考えられる.