IHIグループの多種多様な現場に適用可能なオペレーショナル・テクノロジーを実現するプラットフォーム
ロボットや自動機器を群制御するためのソフトウェアフレームワークRMF2.0の開発
株式会社IHI
IHIは,製造・物流現場の自動化を加速するため,複数ロボットや設備を統合管理できるオープンソースフレームワーク「RMF2.0」の開発に取り組んでいる.これにより現場の作業効率向上や人的負荷軽減,柔軟な工程変更が可能となり,産業界のデジタルトランスフォーメーション( DX )を支える基盤技術としての展開が期待される.
社会的背景と自動化の必要性
近年,日本を含む先進諸国では急速な少子高齢化に伴う労働人口減少が深刻な社会課題となっている.特に日本では製造業や物流業界において,現場作業を担う人材の確保が困難となりつつあり,業務の継続性や生産性の維持に対する懸念が高まっている.このような状況を背景に,ロボット技術を活用した工程自動化が急速に進展している.
従来の工場や倉庫の自動化は,単一のロボットや設備による部分的な自動化が主流であった.そのため,自動化された機械・設備と自動化されていないものが混在し,一度,生産ラインや搬送ラインが構築されると,その構成を変更することは容易ではなかった.とはいえ,それほど頻繁に変えるニーズもなかったため,これが大きな問題になることは少なかった.しかし最近では,E コマース(電子商取引)需要の増大や嗜好(しこう)の多様化に伴って物流現場では需給変動が増大し,製造現場では変種変量生産の必要性が増している.そのため,固定化設備をなるべく置かずレイアウトフリー(自由配置)な生産ライン・搬送ラインの構築ニーズが高まっている.この新しい工場・倉庫には以下三つの観点の実現が求められる.
- スケーラビリティ:規模を変更しやすい
- フレキシビリティ:扱う物品やプロセスを変更しやすい
- アベイラビリティ:一部の設備にトラブルがあっても全体業務を継続できる
高度自動化の技術的課題とOTの進化
これらを実現するため,複数台のロボットや多様な設備を組み合わせ,連携・統合化して全体最適な運用を目指す「群制御」や「システム統合型自動化」の技術開発が各社で進められている.しかしながら,こうした高度な工程自動化には以下のような課題が存在する.
- 各ロボットおよび設備の能力や制約を正確に把握し,最適に組み合わせることが困難
- システム全体の生産性や効率性を事前に予測・評価する手法が未成熟
- トラブル発生時のリカバリーシナリオの成立性を検証する手段が限定的
- 異なるメーカーの機器間でのサポート体制や通信仕様が統一されておらず,連携が煩雑
- 導入には現場環境の整備やITインフラとの高度な連携が必須
従来の部分的な自動化に加え,近年では統合型自動化が求められており,機械・設備を組み合わせて自動で運用するための運用・制御技術は,ITに対してOT ( Operational Technology )と総称されるようになってきた.
これまでOTは製造業やインフラ分野において,現場のノウハウや電機制御技術の一部として個別の業務最適化に用いられてきたが,近年のIT,AI技術,ロボット技術の進展で,より柔軟かつ高度な連携を可能とする統合基盤技術へと進化している.
このようなOTの進化により,以下のような業務最適化が可能となる.
- 工場における緻密なタクトタイム(製品を一定のペースで作るための目安時間)の実現と工程間の同期制御
- 倉庫における入出庫作業の効率化と出荷時間の短縮
- 複数ロボットの協調によるリソースの最適配分と稼働率向上
- 異常発生時の自律的なリカバリーシナリオの実行と業務継続性の確保
オープンソース技術とIHIの取り組み
現在,OTの技術開発は工場や倉庫を保有する企業が自社で行うケースのほか,主要な設備メーカーや生産ライン設計を担うシステムインテグレーターが行う例も多い.これらの多くは,各社独自のプラットフォーム上に構築されており,汎用性や相互運用性を持たせることが課題である.
一方,近年ではロボット間の連携をだれもが利用可能とすることを目指したオープンソースのミドルウェア開発も進められている.その代表例がロボットの開発で世界的に利用が広がるROS ( Robot Operation System )であり,特に複数台の搬送ロボットの最適運用を行うソフトウェアとしてRMF ( Robot Middleware Framework )は,搬送ロボットだけでなく自動ドアやエレベータといった設備,マニピュレータなどの固定型機械との通信が可能なOSS ( Open Source Software )として注目されている.
IHIグループの製品や,そのお客さまが関わる製造現場・物流現場は多種多様であり,陸・海・空・宇宙といった幅広い分野に広がっている.そのため,特定の製品やメーカーのプラットフォームに依存しない,汎用性の高いOTが求められている.
そこでIHIはRMFの可能性に着目し,RMFの開発に取り組んでいるシンガポールのA*STAR Advanced Remanufacturing and Technology Centre ( ARTC )に拠点を置きROSの産業応用を推進するコンソーシアムであるROS-Industrial Consortium Asia Pacific ( ROS-I AP ) (※1)と2023 年から2 者共同での開発に着手した.開発対象は,移動ロボットに加えて固定設備やコンベヤーなどを含む倉庫全体の設備を統合的に管理・制御する新たなソフトウェアフレームワーク「RMF2.0」である.RMF2.0は,従来のRMFの機能を拡張し,より複雑かつ多様な設備構成に対応可能な構造を備えている.OSSの開発は,投資した技術がオープンとなりだれでも自由に使えるようになってしまう点がデメリットと思われがちである.しかし,オープンソースにすることでその開発にだれもが自由に参加でき,① バグの修正や脆弱(ぜいじゃく)性に対する対策などの品質向上,別のソフトウェアやシステムとの接続や拡張機能の追加といったアップデートを企業単体ではなくコミュニティで行える,② 活用が広まればデファクトスタンダードとなり将来必要になる自社開発リソースを大幅に低減できる,などのメリットがある.OSSを戦略的に展開している企業としてはGoogle社やNVIDIA社が挙げられる.
なお,IHIは世界トップレベルの研究者やエンジニアが集まるさまざまな分野のコミュニティであるトップエコシステムに参画してオープンな研究開発を行うことを指向している.本開発もROSというロボット業界で広く活用されているソフトウェアのエコシステムへ参画する取り組みの一つとして位置づけられている.
以下にRMF2.0の技術的構成と機能,そして活用が想定されるシーンについて紹介する.
RMF2.0の技術的構成と機能
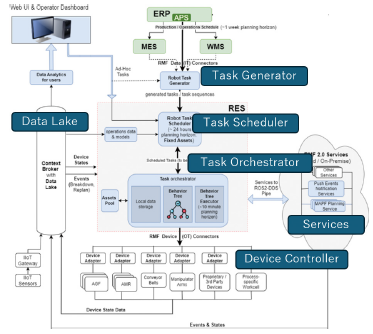
RMF2.0は主に以下の主要コンポーネントから構成される.
- Task Generator
- 上位システムから与えられた業務指示を,ロボットや設備ごとの個別タスクに分解・生成する.これにより,抽象的な業務命令を具体的な実行単位へと変換する.
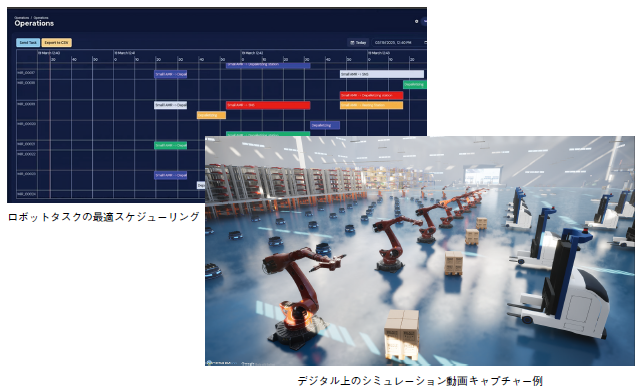
- Task Scheduler
- 生成されたタスクの実行手順は保持したまま,共有リソース(ロボット,設備,通路など)の利用状況を考慮し,各タスクの実行タイミングを最適化する.これにより,リソース競合の回避と全体効率の向上が図られる.
- Task Orchestrator
- スケジューリングされたタスクを,依存関係(作業の順番やつながり)や進捗状況を踏まえて各ロボット・設備に送信する.タスクの遅延や未完了が発生した場合には,動的に実行タイミングを調整することで,業務の整合性を維持する.
- Device Controller
- Task Orchestratorからの指示に基づき,各ロボット・設備を制御する.複数台の自律走行搬送ロボットAMR ( Autonomous Mobile Robot )が存在する場合には,特定のロボットを選定し,作業を割り当てる機能も備える.
- Data Lake
- 実際の現場のセンサー情報やロボットの状態情報を一元的に集約・蓄積する.
- Services
- 移動ロボットの地図情報,渋滞状況,充電計画など,環境に応じた補助機能を提供する.これにより,現場の運用状況に応じた柔軟な対応が可能となる.
- Broker
- 各コンポーネント間で異なる通信仕様を変換・中継し,さまざまなソフトウェアとの連携を容易にする.
- Simulator
- 100 台以上のロボットが同時に稼働する環境を模擬し,各プロセスの実行可否,動作干渉,想定時間などを事前に評価する.これにより,現場導入前の成立性検証と効率予測が可能となる.
RMF2.0は現在,OSSとしての公開準備が進められており,近い将来,ROS-I APより正式に公開される予定である.なお,本フレームワークは当初,自動倉庫システム向けに開発されたが,物流分野に限らず,製造業や特殊環境下での自動化などさまざまなシーンでの活用が想定される.
RMF2.0は現在も開発が続けられており,各要素の機能分担の変更や,新しい要素が加わることもあるので,上記要素はあくまで現在の構成要素である.
RMF2.0の活用が想定されるシーン
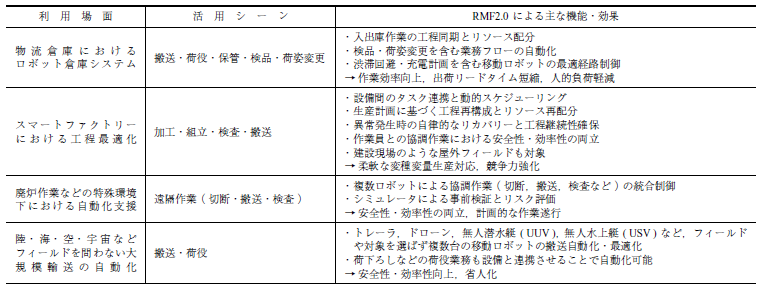
RMF2.0の活用に向けて,下表に示す現場での利用場面を想定し,適用を検討している.
RMF2.0は,複数のロボットや設備を統合的に管理・制御するためのオープンソースフレームワークとして,工程自動化の高度化に大きく貢献する可能性を秘めている.物流倉庫や製造現場,特殊環境下での作業など,幅広い分野への応用が期待されており,今後の産業インフラの標準技術としての定着が見込まれる.
一方で,RMF2.0の社会実装に向けては,以下のような技術的・運用的課題が残されている.
- 異種機器間のインターフェース統一
- スケーラビリティとリアルタイム性の確保
- セキュリティと信頼性の担保
- ユーザーインターフェースと運用支援
- エコシステムの形成とコミュニティの活性化
1 と 3 については業界ごとに標準化の動きがあるため,それに合わせた活動を展開することになると思われる. 2 については全体管制と部分管制を分ける,ロボットの自律性を高める,一部分散制御的な要素を組み込むといった解決策が考えられる. 4 は各社個別の取り組みとして進めることになりそうだが,どの課題にせよRMF2.0がオープンなフレームワークとして 5 のコミュニティを中心に世界中のエンジニアが開発に関わって技術が発展していくことを期待しており,IHIもその活動に貢献していきたい.
今後の展望
今後,RMF2.0は工程自動化の基盤技術として,産業界のデジタルトランスフォーメーション( DX )を支える重要な役割を担うと考えられる.次世代のスマートインフラ構築に向け,技術的課題の克服と現場での実装を目指して,引き続き開発に取り組んでいく.
- 1ROS-Industrial Consortium Asia Pacific ( ROS-I AP )は,グローバルなRobot Operating System Industrial ( ROS-I )イニシアティブのアジア太平洋地域の組織であり,シンガポール科学技術研究庁( A*STAR )の傘下にあるA*STAR Advanced Remanufacturing and Technology Centre ( ARTC ) によって運営されている.