海流発電実証試験の発電特性評価
藤田 穣,市口雅裕,岡諒太朗,小西信克,稲村彰信




藤 田 穣 技術開発本部技術基盤センターシステムエンジニアリンググループ 主査
市 口 雅 裕 株式会社IHI検査計測 制御システム事業部産業システム部
岡 諒太朗 技術開発本部技術基盤センターシステムエンジニアリンググループ
小 西 信 克 技術開発本部技術基盤センター制御・センシンググループ
稲 村 彰 信 ソリューション統括本部ソリューションエンジニアリング部 主幹
2021年に実施した水中浮遊式海流発電システムの実証試験結果を基に同システムの発電特性について評価した.さまざまな流速条件で安定して発電運転を継続できることを確認し,試験結果からパワーカーブや内部消費電力などの発電特性を取得した.発電特性と実測した年間黒潮流速データと組み合わせて設備利用率を算出した結果,本システムが将来的に有力な再生可能エネルギー発電方法であることを確認したので報告する.
We evaluated the power generation performance of the floating type ocean current turbine system based on the results of the demonstration test at 2021. We confirmed that continuous and stable power generation operation is possible under various current velocity conditions, and obtained power generation performance such as power curve and internal power consumption. We calculated the facility utilization ratio by combining the power generation performance with the measured annual Kuroshio current velocity data. The results confirmed that this system is a promising renewable energy generation method in the future.
1. 緒言
IHIで開発を進めている水中浮遊式海流発電システムについて,実海域における実証試験を2017年,2019~2022年に実施した(1).実際の黒潮流域において海流からエネルギーを得て発電試験をした例は少なく,海流の特性を知るとともに,本システムの実現可能性を検証する貴重なデータが得られた.本稿では,2021年の実証試験から得られたデータを基に,評価・検討した発電特性と設備利用率について報告する.また,黒潮の年間流速と設備利用率を基に,離島電源として利用したケースを考察した内容についても述べる.なお,参考文献(1)に海流発電実証試験の概要について記載しているため,本稿と併せてお読みいただきたい.
2. 試験内容
2021年の実証試験では,実証試験機を曳船で曳航することで発電する「発電安定性確認試験」と,黒潮流域の定点位置に停止して黒潮流速で発電する「黒潮ホバリング試験」を実施した.実証試験機の制御は台船上に設置した制御室から行い,発電した電力は係留索に沿わせたダイナミックケーブルから台船上に送電して抵抗負荷装置で消費した.第1図の試験構成図に示すように台船の位置や速度は前方の曳船で制御し,黒潮ホバリング試験時はGPSで台船位置を監視して定点保持するように試験を行った.本試験では次の4項目に重点を置いて評価・検証を行った.
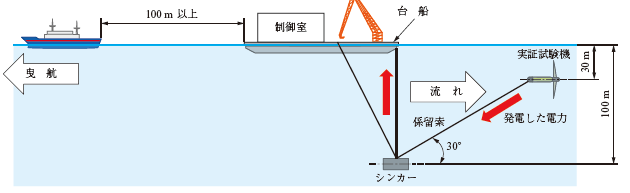
Fig. 1 Diagram of test configuration
2.1 電力変動
事前の机上検討段階では,2017年の実証試験で確認した発電電力の変動(2)の要因が発電機の制御である可能性が高いと考えていた.そのため,発電機の制御ゲインと発電電力の変動との関係を確認し,制御ゲインの調整によって,どの程度電力変動が抑制できるかを検証する.
2.2 非常停止/負荷遮断
実証試験機の発電を,異常なく停止できることを非常停止試験と負荷遮断試験によって確認する.非常停止試験では,発電運転中に非常停止ボタンを押下して実証試験機を急速浮上させる.負荷遮断試験では,定格発電で運転している状態で1次側電源の真空遮断器 (VCB) を開放して送電を止める.
2.3 設備利用率
事業性評価の指標となる設備利用率を推定する.流速と発電電力を実測して実証試験機の流速に対する発電特性曲線 (パワーカーブ) を作成し,黒潮海域の時々刻々の流速と掛け合わせて一定期間積算することにより設備利用率を算出する.また,実証試験機の内部消費電力を計測して設備利用率の計算に反映する.黒潮の1年にわたる流速データは,鹿児島県十島村口之島付近の黒潮海域に流速計を設置して,2021年4月から2022年3月まで計測した.
2.4 離島電源
電力供給をディーゼル発電機に頼る離島環境において,海流発電のような再生可能エネルギーは将来有望な資源として期待されている.前述した設備利用率,年間黒潮流速,および実際の黒潮流速で発電した実証試験機の試験結果を基に,海流発電システムを離島の電力系統に適用した場合の効果や課題について整理する.
3. 結果
3.1 電力変動
発電機の制御ブロック図を第2図に示す.発電機のインバータ内部で回転数フィードバック制御を行っており,回転数指令値は周速比 (タービン翼先端速度と海流流速の比率) が一定になるようにコントローラ内で計算した値を,アナログ信号でインバータに受け渡している.
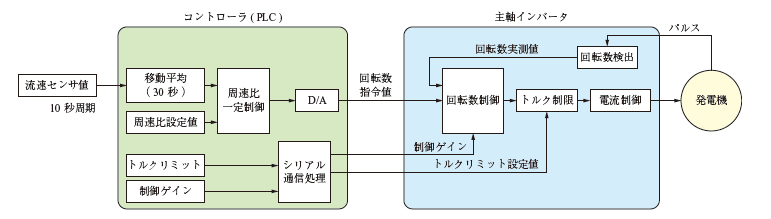
Fig. 2 Generator control block diagram
2021年の実証試験では,初めに回転数制御の制御ゲインが電力変動に与える影響について検証した.制御ゲインには比例ゲインと積分ゲインがある.第3図に比例ゲインを3段階で変更したときの発電電力の時間変動を示す.比例ゲインを小さくすると発電電力の変動が小さくなっており,2017年の発電試験では比例ゲインが大きく,回転数指令値に対して発電機が過敏に反応し,それが発電電力の変動が大きくなった要因の一つであることが分かった.2021年の試験結果から比例ゲインの調整のみで電力変動を大幅に低減できることを確認した (比例ゲインが3のとき,電力変動が57%低減した) .しかしながら,比例ゲインを下げ過ぎるとタービン翼回転数制御が不安定になることから,本試験では安定した制御が可能な範囲で電力変動を最小化する数値を採用した (比例ゲインは5とし,そのときの電力変動低減率は34%だった).
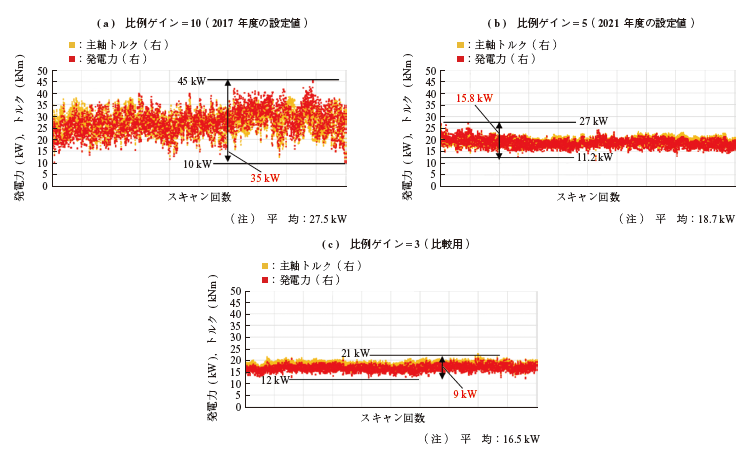
Fig. 3 Relationship between control gain and power generation
3.2 非常停止/負荷遮断
実証試験機は運転中に予期しない事象が発生した場合,非常停止操作によりタービン翼を停止して海面まで浮上する機能を有している.第4図に非常停止試験を示す.非常停止操作を行ったとき,第4図-(a)の時間変化に示すように,タービン翼 (主軸) 回転数が0に低下し,浮体深度も0 mに変化しており,本機能について正常に動作することを確認した.
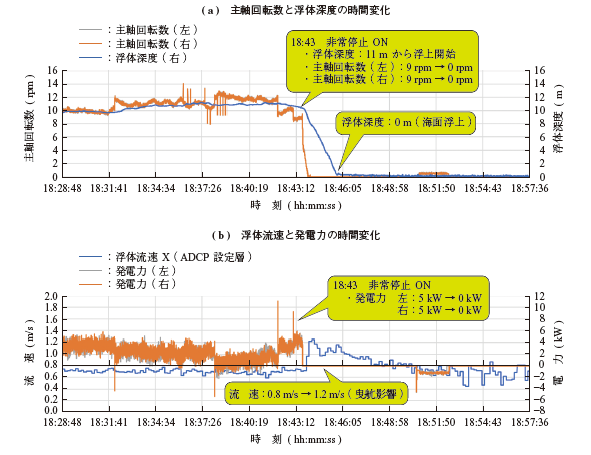
Fig. 4 Emergency stop test
次に負荷遮断時の動作確認を実施した.発電運転中に地絡や短絡を検出した場合,真空遮断器を開放して実証試験機で発電した電力を外部へ送らないように負荷遮断する.このとき実証試験機の発電機は,接続先をインバータから実証試験機本体内の負荷抵抗器に切り替え,同時にタービン翼をフェザリング状態 (タービン翼のピッチ角度を海流の向きと平行にした状態) にすることで海流の力を発電機に伝達しないようにする.
定格負荷運転時に負荷遮断を実施したところ,第5図の負荷遮断試験に示すような動作になった.負荷遮断直後はタービン翼がフリーラン (発電機の回転数を制御するトルクがなくなった状態) になるため,タービン翼回転数が許容回転数 (25 rpm) を超過する可能性が考えられたが,試験の結果,最大回転数は20 rpm以下に収まることを確認した.タービン翼がフェザリング状態になると回転停止する.その後,実証試験機本体のもつ浮力によって徐々に浮上し,深度10 mから海面まで約4分で浮上完了することを確認した.
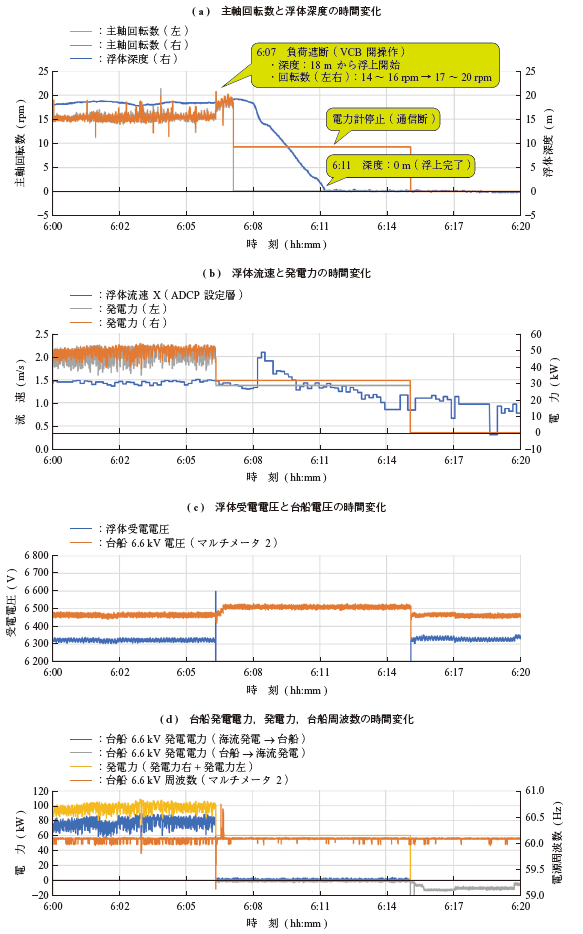
Fig. 5 Load shutdown test
非常停止と負荷遮断の違いはタービン翼の停止位置である.タービン翼は,非常停止の場合は海面に対し水平状態で停止するが,負荷遮断の場合は任意の位置で停止する.これは負荷遮断時に主電源が喪失してタービン翼回転数が制御できなくなるためである.本試験結果から,タービン翼のピッチ角度や発電機ブレーキのタイミングを制御することで,タービン翼を水平状態で停止する制御方式についてめどが得られた.実用機は実証試験機よりもタービン翼径が大きく,タービン翼を水平状態で停止させる必要性が高くなるので,本試験から得られた知見を基に設計を行う.
3.3 設備利用率の推定
設備利用率の算出に使用するパワーカーブを取得するため,流速を変えて発電電力を計測した.流速は0.7~1.7 m/sの範囲で試験し,定格流速 (1.5 m/s) 以上の条件ではタービン翼ピッチの角度を発電電力が100 kW範囲内に収まるように制御した.第6図にパワーカーブを示す.横軸に流速,縦軸を発電電力としてパワーカーブを示すが,計測値の生データには幅があるため,洋上待機や潜航動作時など過渡期にあるデータは削除し,さらに,流速ごとに平均化処理することでパワーカーブを得た.このパワーカーブは設計値に対して良好に合致しており,本実証試験機のタービン設計は妥当であったと考えられる.
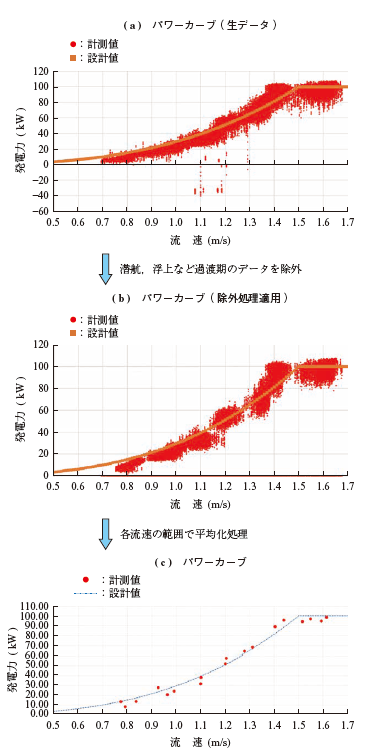
Fig. 6 Power curve
次に内部消費電力について確認した.本試験では浮力制御や姿勢制御の方法を見直して省エネ運転を実現したことに加えて,発電時の発熱に対応する冷却システムの運転も見直し,内部消費電力を最小化するようにした.この状態で黒潮海域での定点運転,黒潮ホバリング試験を行って消費電力を推定した.その結果を第1表の内部消費電力に示す.通常発電時には非常に小さな内部消費電力で運転できることが分かる.これに対して内部消費電力が最大になるのは,低流速潜航の欄に示す海流の流速が低下した状態で海中にとどまるため,発電機を電動機として運転して待機しているときである.このような運転を避けることが内部消費電力を最小にする.本試験はその一例として,低流速海面待機の欄に示す海面に浮上して待機する場合も測定し,この運用ならば消費電力を削減できることを確認した.

Table 1 Internal power consumption (unit : kW)
以上に示したパワーカーブおよび内部消費電力を用いて,設備利用率を計算した.設備利用率の定義を(1)式に示す.この式に本試験の計測結果を代入して設備利用率を推定する.
設備利用率 (%) = 発電電力量 (kWh) 定格出力 (kW) × 期間 (h) × 100 …(1)
(注) 発電電力量 = 期間 × (発電性能 × 流速 - 内部消費電力)
まず,実証試験海域での設備利用率を算出する.発電性能とはパワーカーブ (次元は電力/流速) のことを指し,これに実測した黒潮流速を1時間ごとに平均化して掛け合わせる.ここから流速に応じた内部消費電力を減算して,24回分のデータを加算して1日分の発電電力量とし,1年分をプロットする.その結果,第7図の実証試験海域における年間流速と年間発電量に示すように,黒潮流速の変動が反映された発電電力量の変動の予測値が得られる.設備利用率は,この発電電力量の1年間の総和を「定格出力×期間」で割ったものとなる.本試験の実証試験機を設置して1年間運用した場合を試算すると,設備利用率は22.2%となった.口之島近傍の実証試験海域を設置工事の関係で水深100 m以内の場所としたため,あまり速い流速が得られず設備利用率が低めとなる.それでもこの設備利用率は,太陽光発電や風力発電などと比較しても遜色ない値である(3).
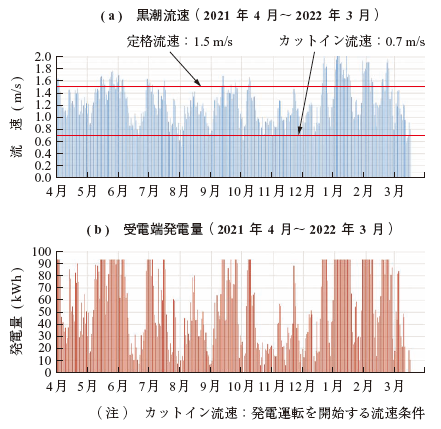
Fig. 7 Annual current velocity and power generation in the test area
3.4 離島環境での電力系統への接続検討
海流で発電した電力は海流の速度によって変動するため,そのままでは口之島のような小さな離島の電力系統には接続できない.そこで口之島の系統への接続を想定して,発電した電力を蓄電池にためて平準化する設備を設計した.第8図に離島 (小規模電力系統) への海流発電適用例として設計した設備の構成図を示す.本構成で送電端 (図中の赤矢印位置) での電力変動をシミュレーションした.電力系統に接続する場合,その電力変動は最小限にしなければならない.そのため陸上設備には非常用ディーゼル発電機を設置して海流発電システムが発電できない非常時に備えるほか,発電量が多いときの電力を蓄電池にためることで平準化する構成を想定した.
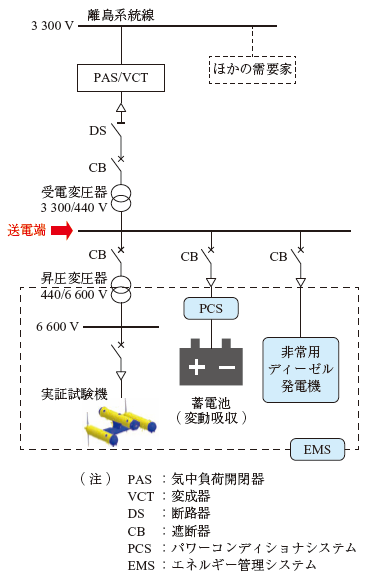
Fig. 8 Example of application to a remote island
第9図に送電端の電力変動シミュレーション結果を示す.実際の黒潮ホバリング試験で得られた発電電力をそのまま入力し,系統への供給電力を10 kWにした場合のシミュレーション結果である.1秒間隔の電力変動を±4.9 kWに抑えることを設定目標 (離島の電源容量を基に電力会社殿と協議して設定した暫定目標値.第9図中における2本の水平線に挟まれた範囲) に定めていたが,シミュレーションの結果ではこの範囲から数か所外れていることが分かる.この原因を分析すると,実証試験機内でアクチュエータを急激に最大出力で運転した場合や,急浮上を行った場合であることが判明した.したがって実用段階では,制御方法や運用方法を見直し,電力変動に応じた容量の蓄電池を採用することによって目標範囲内に収めることが可能である.以上の検討結果から適切な送電設備を準備すれば,海流発電システムで発電した電力を離島の小規模な系統に接続することが可能と考える.
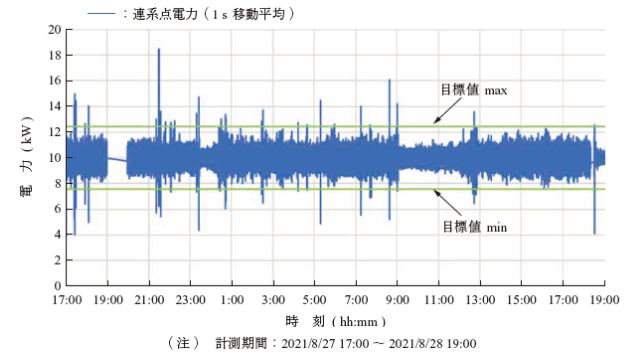
Fig. 9 Simulation results of power fluctuations at the transmission end
4. 考察
電力変動に関しては,主軸の制御ゲインが影響を与えていることを確認した.試験結果から主軸の比例ゲインが発電変動に影響を与えていることを確認した.比例ゲインは発電機のトルクに影響を及ぼすため,発電機のトルクに着目して考察を行った.その結果,発電機のトルク変動の挙動が電力変動の挙動と合致していることが分かった.言い換えるとトルク一定制御が電力変動を抑制するうえでは,最も適した制御方式ということである.第10図に回転数制御とトルク一定制御 (第2図においてインバータ内の回転数制御をトルク一定制御に切り替えた場合) で発電運転した際の発電電力波形を示す.この二つの制御を比較すると,トルク一定制御の方が電力変動を低減できることが分かる.
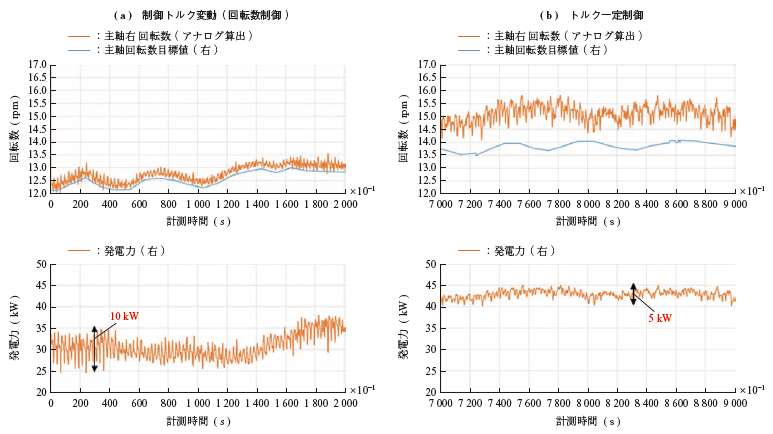
Fig. 10 Comparison of power fluctuations between rotation control and constant torque control
実証試験海域では予想よりも流速が遅かったため,ほかの再生可能エネルギーと同等の設備利用率 (1年間運用時の試算値は22.2%) になった.しかし,第11図の定格流速1.2 m/sに設計変更した場合の年間発電量に示すように,定格流速を1.2 m/s,カットイン流速 (発電運転を開始する流速条件) を0.5 m/sに設定することによって,設備利用率は38.4%まで上昇させることが可能である.さらに,出力2 MW実用機においては設備利用率65~77%が見込める計算結果が得られており,非常に高い設備利用率で運用可能な発電システムである.
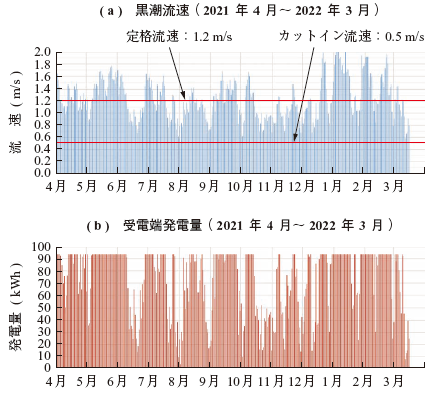
Fig. 11 Annual power generation (rated flow = 1.2 m/s)
また,海流発電は環境にやさしい側面も有している.第12図は発電運転中のタービン翼ブレード付近の様子を水中カメラで撮影した画像である.泳いでいる魚と回転する発電タービンが共存する姿は,海流発電が自然と調和した発電システムであることを示している.

Fig. 12 Turbine blade vicinity during power generation
5. 結言
海流発電実証試験の結果を基に設備利用率を推定・評価した.この結果から,海流発電システムでは,海流のもつエネルギーから目標とした電力 (1.5 m/s流速で100 kW発電) を発電することが十分に実現可能であるとの見通しを得た.また,設備利用率や離島電力系統に接続した場合の電力変動について評価することで,設置海域の流速条件に応じて定格流速,カットイン流速,タービン翼径などの設計を実施する手法について取得することができた.本試験から得られた知見や課題を基に海流発電の実現性について引き続き検討する.
- ― 謝 辞 ―
- 本実証試験はNEDOの助成事業として実施したものであり,多大なるご協力をいただいた.特に研究評価委員会の横浜国立大学名誉教授亀本喬司委員長には多大なご指導をたまわり感謝申し上げます.
- 海流発電実証試験機の制御システム開発に大きく貢献いただいた故・清水真之氏に厚く感謝申し上げます.
参考文献
- 百々 泰,越智文俊:海流発電実証試験の概要と信頼性評価・事業性評価,IHI技報,Vol. 62,No. 2,2023年1月
- M. Shimizu, S. Nagaya, T. Ueno, H. Saito, S. Murata and A. Ito:Development and Demonstration test for Floating Type Ocean Current Turbine System conducted in KUROSHIO CURRENT,Grand Renewable Energy 2018 Japan council for Renewable Energy, (2018), p. 239
- 経済産業省資源エネルギー庁:2030年における再生可能エネルギーについて,2021年7月,https://www.meti.go.jp/shingikai/enecho/denryoku_gas/saisei_kano/pdf/034_01_00.pdf,(参照2022. 4. 29)