さらに安全な踏切を実現する高機能化版3DLR障検
小鷲宜也,佐々木貴英,林 俊寛,橋爪 祥

小 鷲 宜 也 高度情報マネジメント統括本部セキュリティプロジェクト部
佐々木 貴 英 高度情報マネジメント統括本部セキュリティプロジェクト部
林 俊 寛 高度情報マネジメント統括本部セキュリティプロジェクト部 グループ長
橋 爪 祥 技術開発本部技術基盤センター制御・センシンググループ
三次元レーザレーダ式踏切障害物検知装置 (3DLR障検) を高機能化する開発を行った.三次元レーザレーダ式踏切障害物検知装置とは,レーザ光を用いて対象物までの距離を計測することで鉄道踏切内の障害物を検知する装置である.より検知能力の高い障害物検知装置が求められていることから,装置の高機能化に取り組み,転倒検知機能などの開発を行った.模擬環境や実際の踏切にて評価を行い,降雪地域においても転倒物体を検知できることを確認し,従来よりも,踏切の安全性向上と不用意に列車を止めないなどの装置の安定稼働に貢献できる踏切障害物検知装置を提供できるようになった.
We have improved the functionality of the 3D laser level crossing obstacle detection system (3DLR) . 3DLR detects obstacles in level crossings. It detects obstacles by measuring the distance to the target using a laser. Due to demand for obstacle detection devices with higher detection capabilities, we have worked to improve the functionality of the devices and developed a fall detection function. These improvements were conducted in simulated environments and at actual level crossings, and it was confirmed that falls could be detected even on snowy terrain, making it possible to provide an obstacle detection system that contributes to safer and more stable operation than ever before.
1. 緒言
踏切障害物検知装置は,列車と自動車などの衝突の回避を目的とし,踏切内に取り残された物体を,障害物として検知する装置である.万一,踏切内で障害物を検知した場合は,鉄道用信号設備を介して列車乗務員に通報する.列車乗務員は,信号を確認すると列車を緊急停止させる.このような仕組みにより,踏切事故を未然に防いでいる.日本国内においては,交通量の多い踏切を中心として,多くの踏切で導入されている.
三次元レーザレーダ式踏切障害物検知装置 (以下,3DLR障検) とは,レーザ光を用いて対象物までの距離を計測することで,鉄道踏切内の障害物を検知する装置であり,2005年に1号機を納入して以来,日本やヨーロッパなど国内外で,累計2 800台以上を販売している.これまでに培った知見を基に東日本旅客鉄道株式会社と共同で,より検知能力が高く,列車の安定運行に貢献できるような装置の高機能化に取り組み,高機能化した3DLR障検の踏切への導入を2019年度から進めてきた.
独自のアルゴリズムを用いてソフトウェアを改良して高機能化した3DLR障検は,高齢者や車いすなどが踏切内部に取り残される事故の防止などのさらなる安全性の向上や,より正確な検知による列車の安定に,これまで以上に貢献できる.本稿では3DLR障検についての紹介と,高機能化にて開発した機能とその評価結果について述べる.
2. 3DLR障検
2.1 3DLR障検の概要
3DLR障検のイメージを第1図に示す.踏切付近に設置した柱の上部からレーザ光を照射して踏切内を計測し,踏切内の三次元形状を取得して物体を検知する装置である.レーザ光が照射される場所であれば,物体を検知することができるため,他方式と比較して検知エリアが広い.また積雪などにも影響されにくく,車両よりも小さな物体も検知できるという高い検知性能を有していることに加え,設置や修繕に大規模な工事を必要としないことも特長である.
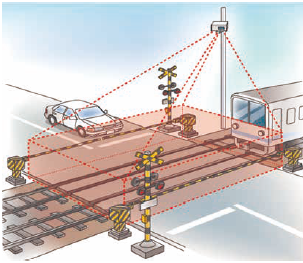
Fig. 1 Image diagram of 3DLR
2.2 3DLR障検の基本構成
3DLR障検の基本的な構成を第2図に示す.ヘッド (レーザ搭載部) は柱の上部に踏切を見下ろすように設置され,レーザ光を照射して踏切内の計測データを取得する.大きな地震や想定外の荒天などにより監視できなくなったことを,監視範囲内に設置している評価用反射体によって検出する.制御器では,ヘッドで取得した計測データを用いた演算を行い,障害物の有無を検出する.制御器は,3DLR障検のデータを記録するための記録装置と一緒に,線路脇などに設置する器具箱に収容することが多い.また,設定や調整を行う場合は,メンテナンス用端末を制御器と接続する.
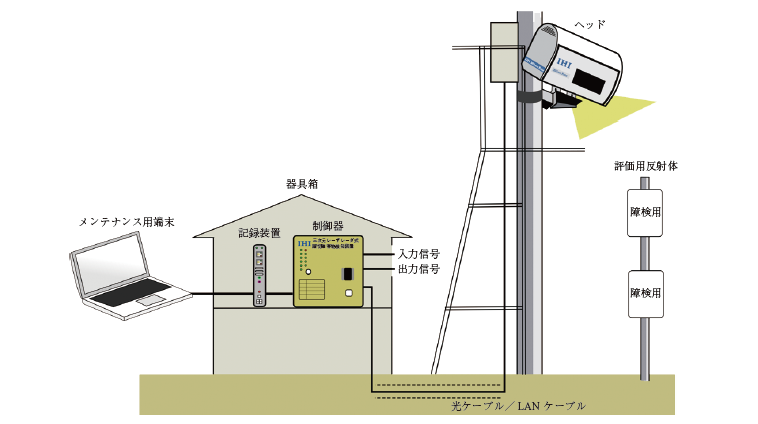
Fig. 2 Basic structure of 3DLR
2.3 3DLR障検の障害物検知方法と機能
3DLRの動作原理を第3図に示す(1)~(3).ヘッド内部には,レーザ光を投光する機構と受光する機構が備えられており,レーザ光を投光してから受光するまでの時間によって対象物までの距離を計測する.ヘッド水平方向とヘッド垂直方向に照射しながら踏切内全体をスキャンし,計測点までの距離を算出する.レーザ光の反射により踏切内の計測点を抽出し,車両などの物体の位置,速度,大きさを演算する.さらに,より適切な検知を行うために,次のような機能を設けている.
- (1) 下部マスク
- 踏切内には積雪,雑草,小動物などのように,障害物ではないが,検知される物体が存在する.このような物体を3DLR障検が過剰に検知し,列車運行を妨げないように下部マスクと呼ぶ機能を設けている.第4図に下部マスクのイメージを示す.下部マスクは基準となる路面から一定の高さにしきい値を設けたものであり,高さがしきい値以下の小さな物体は検知しない.
- (2) 監視エリア
- 3DLR障検はレーザ光を柱の上部から照射するため,扇型に広がりをもったデータとなっている.踏切内全体の計測点の様子を第5図に示す.そのデータから踏切内を特定するため,監視エリア設定機能を設けている.3DLR障検では監視エリアの範囲内でのみ物体検知の処理を実施する.また,監視エリア内を複数のエリアに区分し,エリアごとの滞留時間の情報を取得する.この仕組みにより,踏切内の物体の有無だけではなく,滞留した物体のみを検知することも可能である.
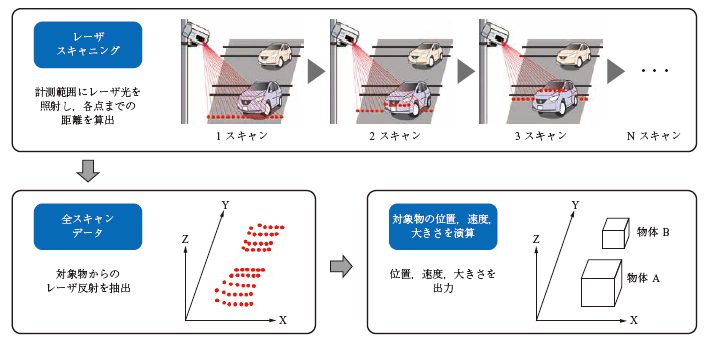
Fig. 3 Basic principle of 3DLR
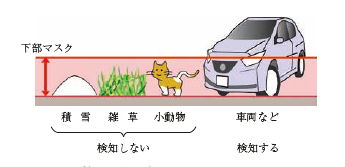
Fig. 4 Image diagram of undetected zone
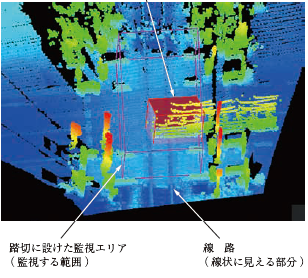
Fig. 5 State of the measure points throughout the level crossing
2.4 3DLR障検の他の機能
- (1) 自己診断機能
- 3DLR障検の部品に異常が発生した場合やレーザ光による計測に支障が出た場合などは,自己診断機能により3DLR障検の状態を判定している.この自己診断機能では,レーザ光の投光・受光,通信,入出力信号の状態を常時監視している.また,第2図で示した評価用反射体の位置やレーザ光の反射強度を常時監視することで,大きな地震などにより設置位置にずれが生じた場合や,想定外の荒天でレーザ光が減衰し,計測できない場合などを検出する.
- (2) データ記録機能
- 第2図で示した記録装置は,3DLR障検の計測データを記録する.計測データを再生することで,監視カメラがなくても,3DLR障検が検知した原因などを調査できる.
3. 3DLR障検の高機能化の取組み
2005年から踏切障害物検知装置として,3DLR障検を導入することで,踏切障害物検知装置の検知性能が向上した.しかし,踏切内での高齢者などの転倒による踏切事故や,車いすによる踏切事故などが後を絶たないことから,学識経験者,鉄道事業者,道路管理者,警察庁,国土交通省からなる「高齢者等による踏切事故防止対策検討会」にて,検知能力の高い踏切障害物検知装置の設置についての検討が提案された(4).このような社会的要請が高いことを受けて,鉄道事業者と一体となって,さらなる検知性能の向上や装置の安定稼働など,3DLR障検の高機能化に取り組んできた.高機能化の取組みとして開発した機能について説明し,その評価結果について述べる.
3.1 転倒検知機能
2.3節で述べた下部マスクは,踏切内にとどまった歩行者が転倒した場合に検知が不安定となる課題があったため,転倒検知機能を開発した.転倒検知機能の概念を第6図に示す.3DLR障検では検知した物体を追跡し,その高さを認識することができる.その高さ認識機能を利用して,追跡している物体が低くなった場合は,物体周囲の下部マスクのみ低くすることで,物体の検知性能を向上させている(5)~(9).
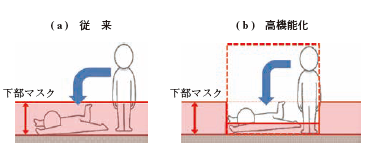
Fig. 6 Concept of falling down object detection function
3.2 路面凹凸補正機能
踏切内は必ずしも平面とは限らず,凹凸のあることもある.転倒検知機能を導入することで,より検知性能を向上できたが,路面の凸部を過剰に検知することや,凹部に転倒した場合には検知が不安定になるなど,新たな課題が出現した.そこで,事前に路面の凹凸形状を計測し,路面の凹凸形状に応じて下部マスクの高さを補正する機能を開発した.第7図に路面凸凹形状の補正を示す.
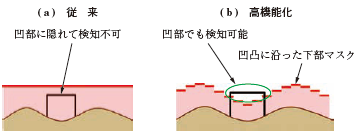
Fig. 7 Correction of undetected zone according to the road surface
路面凹凸補正機能には,あらかじめ踏切内の凹凸形状のデータが必要になる.そこで,柱の上部に設置したヘッドから踏切内を計測し,その計測データをそのまま利用できるようにした.第8図に路面高さのヒストグラムを示す.計測データには,踏切内の歩行者や通行中の車両などの物体も含まれるため,路面上のある1点の高さを一定時間計測すると,第8図に示すようなヒストグラム形状となる.そこで,歩行者や車両を計測した計測点を除外し,踏切路面部のみを抽出して,凹凸形状を計測できるようにした(5)~(9).
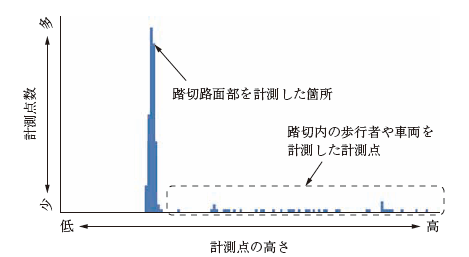
Fig. 8 Histogram of ground surface height
3.3 路面変化への自動追従機能
3DLR障検では,下部マスクの効果により一定量の積雪は検知することはないが,3.1節で述べた転倒検知機能を降雪地域に導入すると,車両や歩行者の足元付近の積雪を誤って過剰に検知する課題が明らかになった.そこで,積雪や雑草などにより徐々に変化する路面に合わせて,下部マスクの高さを自動で追従させる機能を開発した.第9図に路面凹凸形状の自動追従機能の有無の違いを,第10図に路面凹凸への自動追従による下部マスクを示す.しかし,自動追従機能を無制限に設定すると,路面の凹凸形状に合わせて下部マスクが高くなり過ぎて,対象とする物体を検知できなくなる可能性がある.そのため,自動追従する条件として,高さ範囲や路面の凹凸変化量に一定の制限を設けることにした.さらに,転倒した物体が路面として自動追従されないように,物体を検知した箇所については,自動追従を適用しないなど,従来の検知性能を担保しつつ,路面の凹凸形状に合わせて自動追従できるようにした.
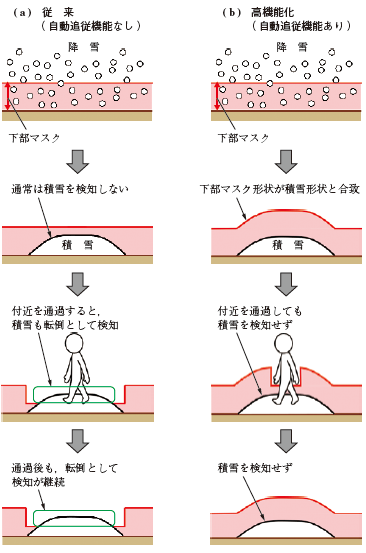
Fig. 9 Differences due to presence or absence of auto adjustment function to the road surface
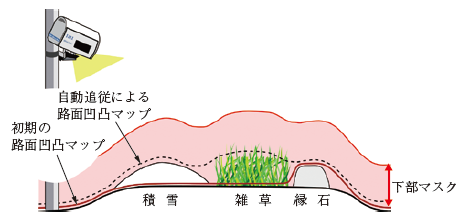
Fig. 10 Undetected zone by automatic adjustment to the road surface
3.4 ノイズ除去機能
第11図にノイズ除去イメージを示す(7)~(9).レーザ光が反射することで,雪粒を障害物と誤って検知する事例がある.特に雪粒が大きく,降雪量が多いときに発生しやすい.雪粒の検知が発生するような天候の場合は,検知が繰り返し発生し,列車運行に支障を与えることから,雪粒などに該当する計測点を除去する機能を開発した.雪粒にレーザ光が当たる場合には,周囲とは独立した計測点となることが多い.そのような独立して計測されたレーザ光の計測点をノイズとして除去する機能を設けた.
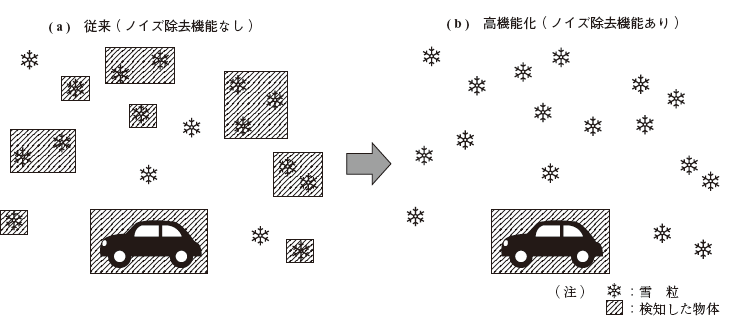
Fig. 11 Image diagram of noise removal function
3.5 記録装置の遠隔通信
3DLR障検のデータは記録装置に保存されている.その記録データを回収するためには,作業員が現地に赴く必要があった.そこで通信機能をもった新たな記録装置を開発し,遠隔からデータを回収できるようにした.これにより,作業員の負担を軽減できる.また,万一の障害発生時には,3DLR障検の計測の様子を遠隔からリアルタイムで監視でき,より柔軟な対応が可能となることで,列車運行への支障を最小限とすることに貢献できる.
4. 開発した機能の検証と評価
4.1 転倒検知機能
踏切の模擬環境を構築し,転倒状況を再現して試験を行った.第12図にさまざまなケースでの転倒検知試験を示す.単純な転倒のケースだけでなく,実際に発生し得るケースを想定し,(a) 車いすでの転倒,(b) 転倒物体の前を車両が通過するケース,(c) 自転車との衝突による転倒,(d) 人混み内での転倒など,実際の踏切では検証が難しいケースを再現し,検証を行った.その結果,転倒検知機能により,従来の3DLR障検では検知できなかった転倒を正しく検知できることを確認した.
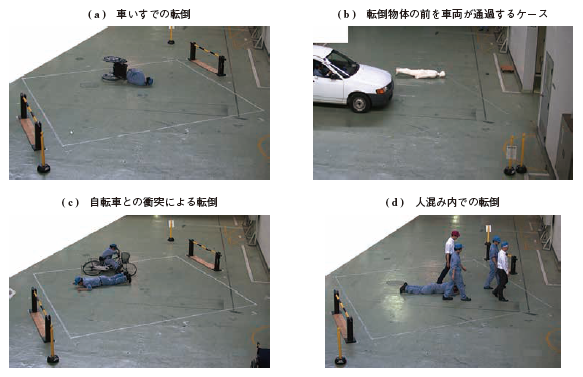
Fig. 12 Falling down object detection test in various cases
模擬環境での結果を踏まえ,実際の踏切においても転倒状況を再現して試験を行った.第13図に実踏切での転倒検知試験状況を,第14図に実踏切での転倒検知検証結果を示す.第14図-(a)は従来の3DLR障検での検出結果を示しており,転倒を検知できていない.一方,第14図-(b)では転倒検知機能を導入した3DLR障検の検知画面を示しており,従来では未検知となっていたレール面に伏せている転倒者を,検知できることを確認した.

Fig. 14 Result of falling down object detection verification in actual level crossing
4.2 路面凹凸補正機能
第15図に,実際に歩行者や車両が通過している踏切について,路面凹凸形状を作成した例を示す.第15図-(a)は,実際の踏切の映像であり,第15図-(b)から,歩行者や車両などの計測点が計測データに含まれているため,実際の路面よりも高い凹凸形状が作成されていることが分かる.そこで,一定時間の計測をして,歩行者や車両を計測した計測点を除外し,踏切の路面部のみを抽出する.この補正により,第15図-(c)に示すように踏切内の縁石形状や,歩道と車道間の凹部の形状が再現され,路面の凹凸形状が得られた.
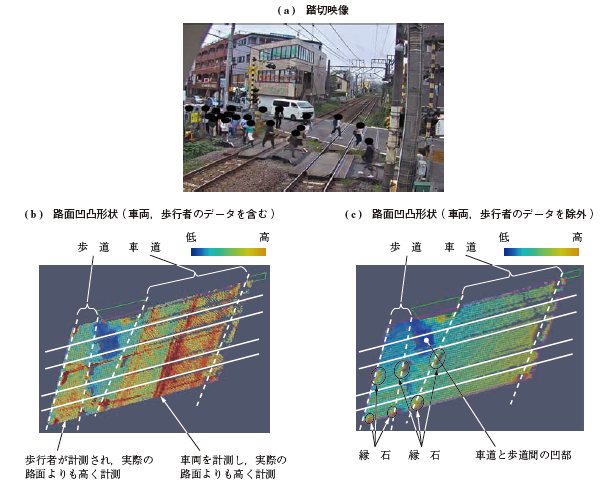
Fig. 15 Example of the road surface measurement data
4.3 路面変化への自動追従機能
降雪地域の踏切で取得した3DLR障検の計測データを使用し,検証を行った.取得したデータのうち,特に積雪が多い1週間分のデータを対象とし,積雪を検知した回数を比較した結果を第1表に示す.検証対象とした踏切は,踏切の設置箇所や交通量の違い,融雪装置の種類などを考慮し,5か所を選定した.①従来版では,積雪が下部マスクを超えることがなく,積雪を検知した事例は発生していない.しかし,②高機能化版 (自動追従機能なし) では,転倒検知機能を有効としたことで,踏切内の積雪を転倒として検知する事例が多く発生した.新たに開発した自動追従機能を有効にした③高機能化版 (自動追従機能あり) では,転倒検知機能を有効としても,積雪状況に応じて路面凹凸形状に自動追従したことにより,積雪を検知しなくなった.降雪地域においても転倒検知機能を導入できる見込みを得ることができ,自動追従機能の有効性を確認した.
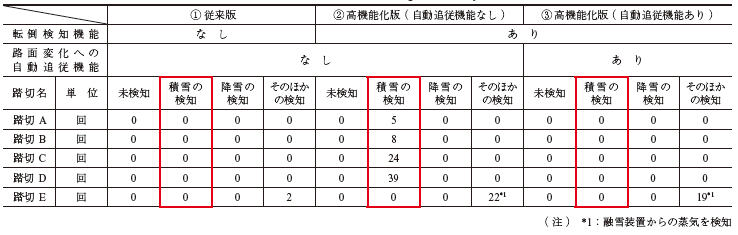
Table 1 Verification result of level crossing under snowy environment
踏切Aの積雪時における状況を第16図に示す.第16図-(a)は積雪環境下の踏切内に車両が立ち入っている状況である.第16図-(b)の左図は,②高機能化版 (自動追従機能なし) の検知状況を示しており,車両は正しく検知しているが,積雪を転倒として検知してしまっている.一方,第16図-(b)の右図は,③高機能化版 (自動追従機能あり) の検知状況を示しており,車両は正しく検知しているが,積雪は検知していない.第16図-(c)は,積雪のない初期状態から,路面の凹凸形状における変化量を示したものである.車道部分は積雪が少ないため上昇量があまり変化していないが,歩道部分は積雪が多いため上昇量が高くなっており,積雪による路面変化に合わせて,適切に自動追従していることを確認した.
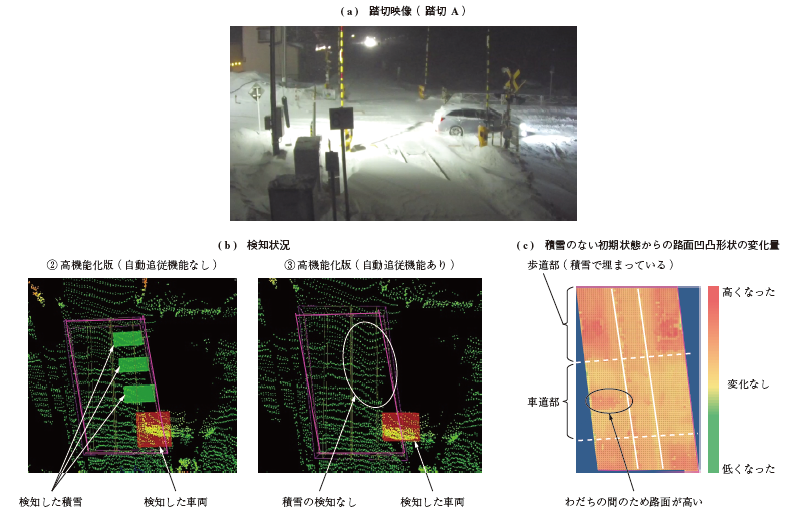
Fig. 16 State of the amount of change in level crossing the road surface
4.4 ノイズ除去機能
降雪期間において,降雪の影響を受けやすい踏切にて,3DLR障検の計測データを取得し,ノイズ除去機能の検証を実施した.第2表に想定外の降雪の検知による障害物検知回数とその時間を示す.従来版では,検証した4か所の踏切のうち,踏切H,踏切Iの2か所にて想定外の降雪があり,降雪の検知が生じた.ノイズ除去機能を有効とした高機能化版では,いずれの踏切においても降雪の検知がなくなり,有効性を確認できた.
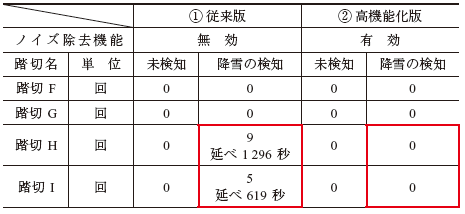
Table 2 Obstacle detection output due to false detection of heavy snowfall
4.5 記録装置の遠隔通信機能
複数の踏切において,遠隔通信機能を有した記録装置を設置し,遠隔にてデータを取得できることを確認した.複数回の踏切の障害が発生したが,踏切まで作業員が赴かずに,事務所内で障害発生状況を遠隔から把握できるようになり,遠隔通信機能の有効性を確認できた.
5. 結言
社会的要請が高いことを受けて,3DLR障検の高機能化に取り組んできた.その結果,転倒検知機能および路面凹凸補正機能の導入により,従来は検知が難しかった転倒した物体の検知性能を向上させることができた.降雪地域においては,転倒検知機能により,積雪を検知する課題が判明したが,路面変化への自動追従機能を開発したことで,降雪地域でも転倒検知機能を導入できるようになった.これらの取組みにより踏切の安全に寄与する踏切障害物検知装置を提供できるようになった.また,ノイズ除去機能や記録装置の遠隔通信により,従来よりも装置の安定稼働に貢献できるようになったと考える.今後も,社会的要請に応えるため,さらなる踏切の安全性の向上と,3DLR障検の安定稼働に向けて,貢献していく.
- ― 謝 辞 ―
- 本稿の成果は,東日本旅客鉄道株式会社との共同研究によって得られたものです.実際の踏切での評価は東日本旅客鉄道株式会社の協力により実施しています.関係者の皆さまに深い感謝の意を表します.
参考文献
- K. Sekimoto, K. Nagata and Y. Hisamitsu:3D Laser Radar for Traffic Safety System, Industrial Applications of Laser Remote Sensing, T. Fukuchi and T. Shiina,Bentham Science Publishers, (2012), pp. 143-152
- 久光 豊,関本清英,永田宏一郎,上原 実,大田栄一:三次元レーザレーダ式踏切障害物検知装置の実用化,IHI技報,Vol. 48,No. 1,2008年3月,pp. 1-6(592.1KB)
- 関本清英,鎌上則夫,久光 豊,小野一也,永田宏一郎:三次元レーザレーダの開発,石川島播磨技報,Vol. 43,No. 4,2003年7月,pp. 114-117
- 高齢者等による踏切事故防止対策検討会:高齢者等の踏切事故防止対策について,2015年10月
- 矢尾裕樹,佐野美和子,北村 知,石間礼次,村上 徹:3DLR式踏切障害物検知装置の高機能化に関する開発,JR EAST Technical Review,No. 66 - 2021,2021年,pp. 48-51
- Y. Yao, S. Kitamura, R. Ishima, T. Murakami, T. Hayashi, T. Takahashi, Y. Kowashi and Y. Segawa:Enhancement of Detection Functions of a 3D-Laser-Radar-Type Obstacle Detection System at a Level Crossing, WIT Transactions on The Built Environment (Computers in Railways (COMPRAIL) XVII), Vol. 199, (2020),pp. 43-52
- 小鷲宜也,林 俊寛:三次元レーザーレーダ式 踏切障害物検知装置と高機能化,光アライアンス,Vol. 33,No. 3,2022年3月,pp. 9-14
- 矢尾裕樹,長坂雄一,石間礼次,村上 徹,小鷲宜也,林 俊寛:3DLR式踏切障害物検知装置の高機能化に向けた開発,鉄道と電気技術,Vol. 33,No. 3,2022年3月,pp. 9-13
- 矢尾裕樹,長坂雄一,小鷲宜也,林 俊寛:三次元レーザレーダ式踏切障害物検知装置の高機能化開発,JREA,Vol. 65,No. 8,2022年8月,pp. 46 292-46 295