三次元レーザレーダとAIで高速道路の安全を守る
高速道路出入口での逆走・誤進入を検知警告する
株式会社IHI
高速道路では,逆走や,歩行者や自転車の誤進入が安全上の大きな課題となっている.IHIはこれまでに培ったセンシング技術にAIによる形状マッチングを組み合わせ,逆走・誤進入を高精度で検知・警告するシステムを開発した.
道路交通を取り巻く状況
道路環境の整備や自動車の安全技術の向上により,ここ20 年間,日本国内の交通事故発生件数と交通事故死者数は減少を続けている.しかしながら,道路交通に関連する法令,ドライバーや歩行者のバックグラウンド,自動車の安全技術や自動運転技術など,道路交通を取り巻く状況は多様化や複雑化の一途をたどっている.
特に,高速道路の出入口部では,出口車線から車両が高速道路に進入する逆走や,高速道路の通行を禁止されている自転車や歩行者が誤って進入する誤進入が大きな課題となっており,高速道路ではこれらの防止や,発生した場合には速やかに検知し通知することが求められている.
IHIは,踏切障害物検知装置に適用されている三次元レーザレーダ ( 3D Laser Radar:3DLR ) で培ったセンシング技術を応用しこの課題の解決に取り組んだ.
3DLRとは
3DLRは,IHIが1990 年代から開発を進めているLiDAR ( Light Detection And Ranging ) である.LiDAR は,レーザパルスを射出し,物体により反射され戻ってくるまでの時間を計測することで物体までの距離を計測する装置であり,画像処理方式のセンサーと比較し,夜間も性能を発揮できるメリットがある.3DLRは,レーザパルスを走査することで物体を三次元的に計測できるようになっている.現在は,鉄道の踏切障害物検知装置として国内外の鉄道に採用され,これまで約3,200 台の販売実績がある.
ITS(Intelligent Transport Systems,高度道路交通システム)においても,路側の柱に設置し,道路上や歩道上の物体の種別,位置,速度,進行方向など,さまざまな情報を検知し送信する路側センサーとして採用されている.
近年IHIは,国内で官公庁や研究機関,企業が進める自動運転の実証試験に参加している.自動運転車から認識できない領域に存在する物体を検知して走行を支援することを目的に,IHIの3DLRを含む各種LiDARを路側センサーとして提供している.
高速道路の交通安全の課題
高速道路での逆走・誤進入は重大な交通事故に結びつく事象であり,それを速やかに検知し警告することができれば,事故の防止や事故による被害を低減することができる.
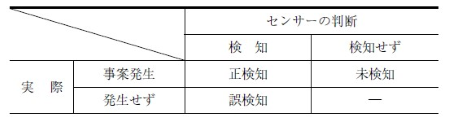
名古屋高速道路公社は,画像処理方式のセンサーを用いて逆走・誤進入を検知する実験を行った経験があるが,誤検知(実際は事象が発生していないが,センサーは発生したと判断)の頻発や夜間での検知精度の低下という問題があった.
高速道路への適用
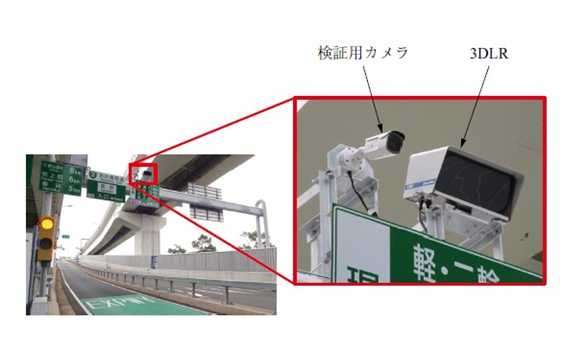
この問題の解決のため,IHIは3DLRを用いたセンシング技術を応用する共同研究の打診を受け,高い精度での事象の検知や,誰にでも分かりやすい方式での警告表示が可能であるか検証する試験を2022 年度より開始した.
検証試験の場所として,近年の逆走・誤進入の発生頻度が高く,道路構造上センサーを設置し検証を行いやすい出入口を選定し,3DLRを用いたロジック,システムの開発を進めた.

逆走を高精度で検知
検証試験の結果,渋滞状況において誤検知の発生頻度が高いことが課題となった.従来のロジックでは,物体により反射された赤外線パルスの点群形状から物体の位置を推定し,その変化量と時間経過から物体の進行方向を推定している.しかしながら,渋滞状況ではセンサーの視界が手前の物体に遮られ,点群形状から物体の位置を正確に把握することが困難であり,進行方向を誤って検知する状況が発生することが原因だった.
これに対し,点群形状から物体の位置とその変化量をより正確に推定するロジックを開発し,テストデータおよびテスト運用での検証により,実用上十分な検知精度が得られたことを確認した.
なお,未検知は従来のロジックでは発生しておらず,上述の誤検知に対するロジック開発後も同様であった.
誤進入検知における種別識別精度の向上
誤進入の検知で課題となったのは物体の種別の正確な識別である.従来の検知ロジックでは,主に物体のサイズにより,普通自動車/大型自動車/自動二輪車/自転車/歩行者を識別していたが,精度が十分ではなかった.
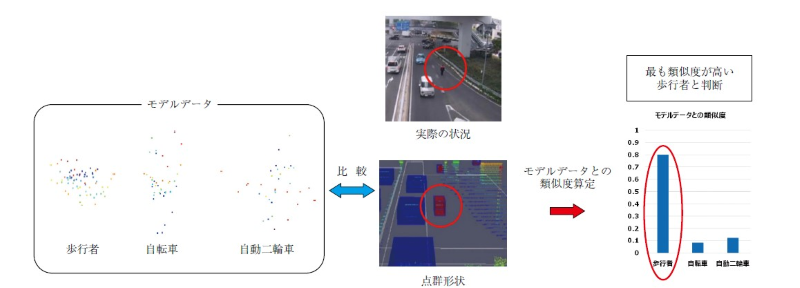
これに対し,AIによる形状マッチングを用いて物体の種別を推定するロジックを追加した.このロジックでは,すでに公道にて設置運用されている3DLRで計測した通行物体の点群形状と,その物体の種別(カメラ映像にて目視で確認)のセットを学習データとしてAIに入力しモデルデータを作成する.次に,3DLRで計測した検知対象物体の点群形状をモデルデータと比較し,類似度および速度やサイズ情報から複合的に物体の種別を推定する.テストデータおよびテスト運用での検証により,このロジックの適用で実用上十分な精度が得られることを確認した.
警告および通知機能の実現
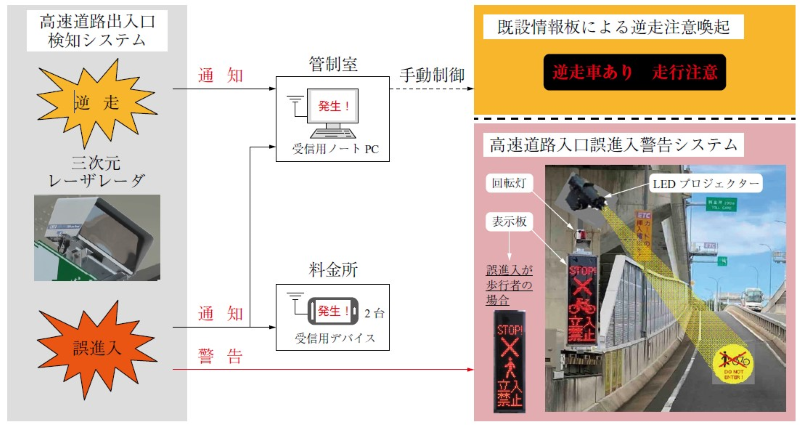
在留外国人やインバウンド旅行客といった日本語では意図が伝わりにくいドライバーや歩行者による誤進入が増加傾向にあるため,誰にでも分かりやすい警告表示の方法を検討した.その結果,回転灯の動作,表示板によるピクトグラムの表示,LEDプロジェクターによる道路面へのピクトグラムの投影を同時に行う方法を採用した.
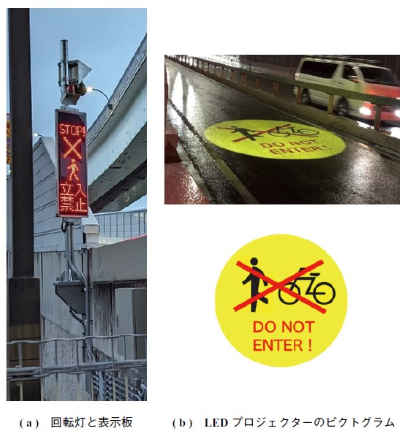
特にLEDプロジェクターによる警告は名古屋高速道路公社としても初めての試みであり,誤進入した人物が気付きやすく理解しやすくなることが期待される.
また,高速道路本線への逆走・誤進入の防止や本線通行車両への情報伝達のため,それらの発生を道路管理者の管制室や料金所に通知する必要があり,4G回線を用いて逆走・誤進入の発生およびシステムの動作状態を常時送信する機能を実装した.逆走・誤進入やシステムの異常発生時は,画面表示および音声によって通知される.
成果と今後の改善案
本開発・検証の結果,高速道路出入口の逆走・誤進入を検知するシステムとして実用上十分な検知精度を得ることが確認できた.
今後は,本システムを他の出入口に展開することを計画している.出入口の道路形状や環境に応じて,機能の追加や調整が必要となる可能性があるため,引き続き開発を進める.
また,進入する自動二輪車が高速道路の通行を認められている区分の車両であるか否かを判断する機能の追加も視野に入れ,ロジック開発と検証試験を継続している.
さらなる普及に向けて
出入口の逆走・誤進入に限らず,本線,合流部,工事区間などのさまざまな場面において危険事象は頻発している.特に,道路形状が複雑,急なカーブが多く見通しが悪い,加速車線が短いなどの危険性が高い場面において路側センサーにて危険事象を検知し,通行している自動車や管理者に警告や通知することによって交通の安全性を高める効果を得られることが期待される.
IHIは,これまでに培ったLiDARによる物体や危険事象のセンシング技術の知見とノウハウをさらに発展・向上させ,多種多様な場面において交通安全を効果的に実現し,新たなモビリティ社会の課題やニーズに対応していく.