燃料デブリを安全かつ効率的に取り出すために
高放射線環境下での遠隔操作による大型搬送技術の開発
株式会社IHI
原子炉の上部から原子炉内部へ接近し,燃料デブリを取り出す工法では,損傷したウェルシールドプラグ(原子炉ウェルと呼ばれる開口部からの放射線を遮蔽するために使用される,大型の鉄筋コンクリート製のふた)に近づき,そのウェルシールドプラグを吊り上げ,搬出することが必要となる.この一連の工程は廃炉作業で要求されるが,高放射線環境下で遠隔操作により実施しなければならず,技術的難度が高い.IHIグループは,この前例のない技術開発に挑戦している.
はじめに
福島第一原子力発電所の廃炉作業の主要工程の一つに,炉内に残る「燃料デブリ」(原子炉の事故で核燃料や構造物などが過熱・溶融し,それが冷えて固まったもの)の取り出しがある.
この燃料デブリを原子炉から取り出す工法の一つとして,原子炉上部から気中に露出した状態で水をかけ流しながら,切断・搬出する「気中上取り出し工法」が検討されている.燃料デブリを原子炉から取り出す工法は他に,原子炉建屋全体を新規構造物で囲い,原子炉建屋全体を水で満たし,水中で取り出し作業を行う方法や,燃料デブリをセメントなどの充填剤で固めて安定化させ,掘削して取り出す方法などが検討されている.
IHIグループでは,気中上取り出し工法を実施するうえで必要となるウェルシールドプラグ(原子炉ウェルと呼ばれる開口部からの放射線を遮蔽するために使用される,大型の鉄筋コンクリート製のふた)に高放射線環境下で近づき,そのウェルシールドプラグを吊り上げ,搬出するための搬送装置を開発した.
遠隔でのウェルシールドプラグ搬送を可能とする大型搬送装置の開発
従来ウェルシールドプラグの搬送は,原子力発電所上部の機器の運転や管理用作業スペースであるオペレーションフロア(以下,オペフロ)上にある天井クレーンを使用し,作業員の補助のもと行われてきた.しかしながら,ウェルシールドプラグは原子炉の事故で損傷し,放射性物質による汚染が確認されている.また周辺は,高放射線環境になっているため,作業員の補助を前提とした搬送作業は難しい.
そのため,以下の機能を持つ搬送技術が求められている.
- ウェルシールドプラグの損傷状態を遠隔操作で確認できること.
- 遠隔操作による吊り上げ,搬送作業ができること.
IHIグループではこれらの機能を満たす装置として大型搬送装置を開発した.
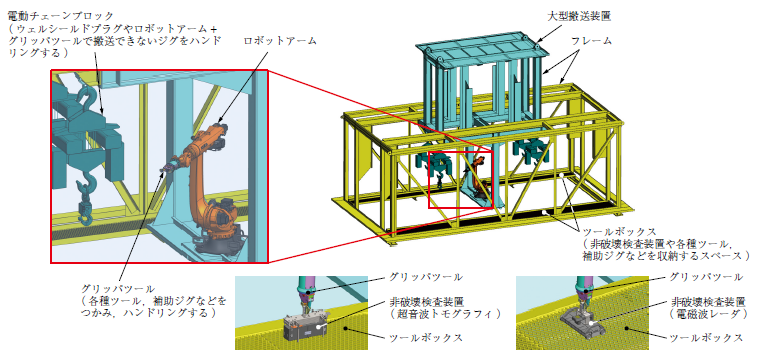
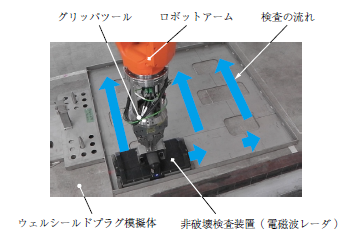
大型搬送装置は吊り上げに必要な強度を持つフレームの他,内部に各種操作を遠隔で行うためのロボットアーム,ウェルシールドプラグを吊るための電動チェーンブロック,損傷状態を確認するための非破壊検査装置などで構成される.この外周をビニール製のカバーで覆い,ウェルシールドプラグ搬送時の放射性物質を含んだダスト飛散防止を図っている.
大型搬送装置には,搭載しているロボットアームを作業場所のウェルシールドプラグ位置に合わせて,横行および垂直移動させる機能を持たせた.このロボットアームが非破壊検査装置をハンドリングすることにより,ウェルシールドプラグ上にある任意の場所の損傷状態(コンクリート部のひび割れ範囲,鉄筋の破断有無など)を遠隔で検査できる.また,ウェルシールドプラグの搬送は,従来の搬送で使用される既存のラグで吊る方法と新たにあと施工アンカー工事を行い,新規にラグを設置して吊る方法の2 種類の方法に対応できるようにした.
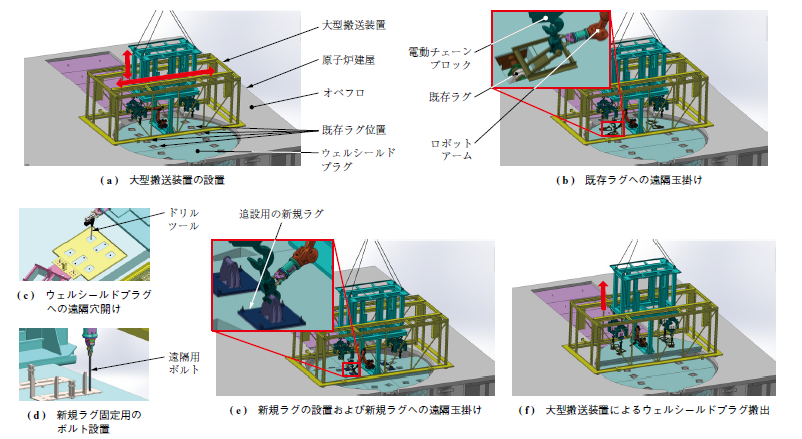
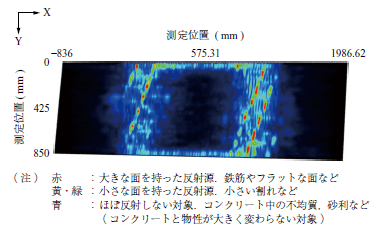
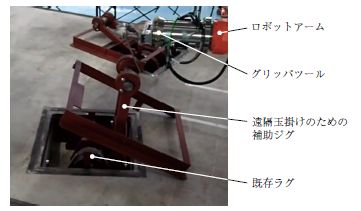
既存ラグを使用する場合の課題は二つある.既存ラグが事故および事故後の影響を受けても健全であることを確認すること.また,従来作業員の補助のもと行われてきた玉掛け作業を遠隔で行うことである.既存ラグの健全性の確認は,既存ラグ周辺のコンクリートひび割れの有無を非破壊検査装置(超音波トモグラフィ)によって確認する.既存ラグへの遠隔玉掛け作業は,ロボットアームを使用して既存ラグへ玉掛け用の補助ジグを設置し,電動チェーンブロックをアシストすることで可能とした.
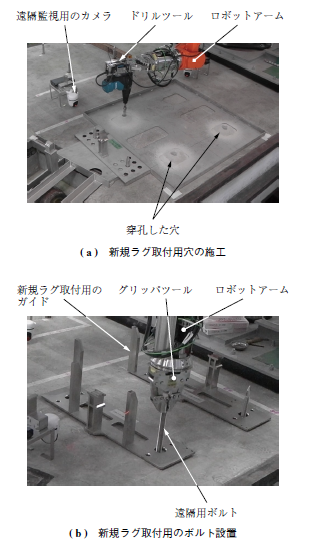
非破壊検査をした結果,既存ラグが使用できない可能性も考慮する必要がある.この場合,あと施工アンカーを打設することで対応する.本開発では,あと施工アンカー工法として,コンクリートに開けた穴に薬剤とアンカーボルトを挿入して固定するケミカルアンカーを採用した.
固定したアンカーボルトに新規ラグを設置し,既存ラグと同様にロボットアームと電動チェーンブロックによる遠隔玉掛け作業を行い,ウェルシールドプラグの搬送ができるようにした.

あと施工アンカー打設の適用に関する主な課題は二つある.ウェルシールドプラグ上に穴を開け,アンカーボルトを固定しなければならず,ウェルシールドプラグ内部には鉄筋が組み込まれており,鉄筋をかわした位置で穴を開ける必要がある.また,通常あと施工アンカー打設は作業員が人手で行う作業であるため,遠隔で行う方法を確立する必要がある.
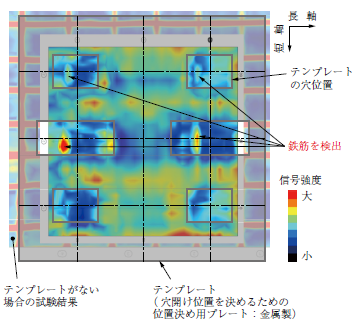
ウェルシールドプラグ内部の鉄筋の探査は,大型搬送装置に付帯した非破壊検査装置(電磁波レーダ)による金属探知によって実施できるようにした.金属探知ではロボットアームとグリッパツールにより,金属製のテンプレート(数か所に開口を設けたもの)をウェルシールドプラグ上に置き,テンプレート上の開口を穴位置として仮決めする.その後,非破壊検査装置で仮穴位置に鉄筋がないことを確認する.試験ではテンプレートの有無で金属探知をそれぞれ行い,テンプレートがある場合でも穴位置に鉄筋の有無を検出できることを確認した.また,あと施工アンカー打設の遠隔化についても,ロボットアームに各種先端ツールを持たせる機能を付加することで可能とした.
各ジグを遠隔で設置するために,ガイドを設けて,位置合わせをしやすくするなどの工夫をしている.これにより,ウェルシールドプラグの損傷状態に応じて,適切な方法を選択できるようにした.
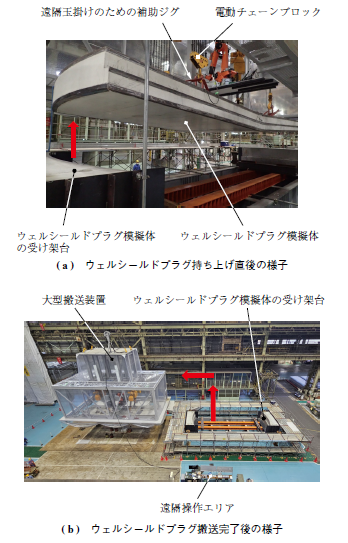
実寸大ウェルシールドプラグ模擬体を用いた大型搬送装置の検証
開発した大型搬送装置の性能を評価するため,社内に設置した実規模のウェルシールドプラグ模擬体を用いた検証試験を行った.ウェルシールドプラグ模擬体には実際の損傷状態を推定し,同程度の損傷を与えた.
開発した大型搬送装置により,ウェルシールドプラグ模擬体の損傷状態(模擬した損傷部や既存ラグ周辺のコンクリートの亀裂状態や内部の鉄筋コンクリートの破断有無など)を遠隔で検査し,既存ラグと新規ラグそれぞれを吊り点として使用することにより,実寸大ウェルシールドプラグ模擬体の搬送が可能であることを検証した.
今後の取り組み
本成果は,経済産業省/令和5 年度開始「廃炉・汚染水・処理水対策事業費補助金(燃料デブリ取り出し工法の開発(気中上取り出し工法における大型搬送装置等のオペフロ上部設備の開発))」に係る東双みらいテクノロジー株式会社からの受託事業において得られたものである.
本技術開発によって,福島第一原子力発電所の廃炉作業の一つである燃料デブリ取り出しに向けて必要となる,大型搬送装置および遠隔作業技術を現場に適用する基礎を確立した.
今後の課題として,遠隔操作が過度に操作者の技量に依存しない装置となるように,作業の安定性向上や手順合理化の観点で高度化を図る.